前端
汽车
numpy
springcloud
云idea
abapgit
xshell
HID
基础入门
mvc
离线仿真项目
momentum
资损
RE理论干扰源的分析
假设检验
photoshop
HAL库
京东
printf
Security
平面
2024/4/11 19:15:32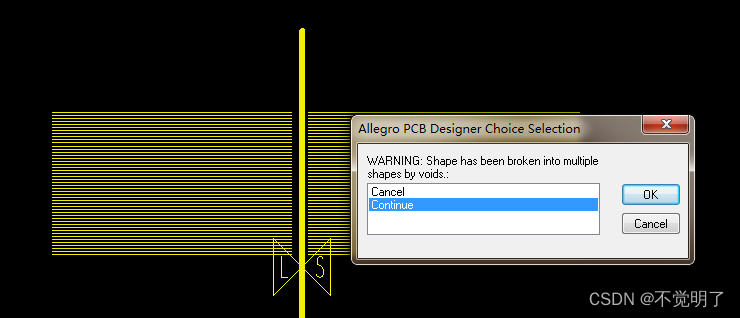
Allegro172版本如何在不使用Skill的情况下CUT断动态铜皮操作指导
Allegro172版本如何在不使用Skill的情况下CUT断动态铜皮操作指导 在用Allegro进行PCB设计的时候,铺动态铜皮是非常常用的操作,有时需要将一块铜皮一分为2,在中间进行CUT断操作,如下图 在不借助skill的情况下,常规操作是将动态铜皮改成静态铜皮,然后画一根走线,最后铜皮避…
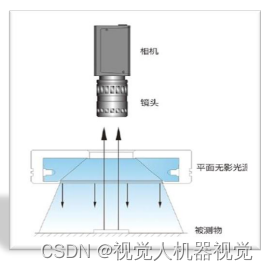
机器视觉系统选型-穹顶光源,方形无影光源,平面无影光源及应用场景
穹顶光源 利用圆顶形状的反射板均匀照射漫射光
磨砂面的刻印、损伤检测金属、玻璃等表面反光较强物体的表面检测印刷检测凹凸不平面的外观检测 方形无影光源 从四个方向照射低角度漫射光电子零件字符识别金属表面划伤检测烟盒表面检测 平面无影光源 从平坦的发光面照射漫射光表…
PCB封装设计指导(一)基础知识
PCB封装设计指导(一)基础知识 PCB封装是PCB设计的基础,也是PCB最关键的部件之一,尺寸需要非常准确且精确,关系到设计,生产加工,贴片等后续一系列的流程。
下面以Allegro为例介绍封装创建前的一些基础知识 1.各个psm文件代表什么
mechanical symbol 是.bsm
Package sy…

CSS平面转换和渐变
01-平面转换
简介
作用:为元素添加动态效果,一般与过渡配合使用
概念:改变盒子在平面内的形态(位移、旋转、缩放、倾斜) 平面转换也叫 2D 转换,属性是 transform
平移
transform: translate(X轴移动距…
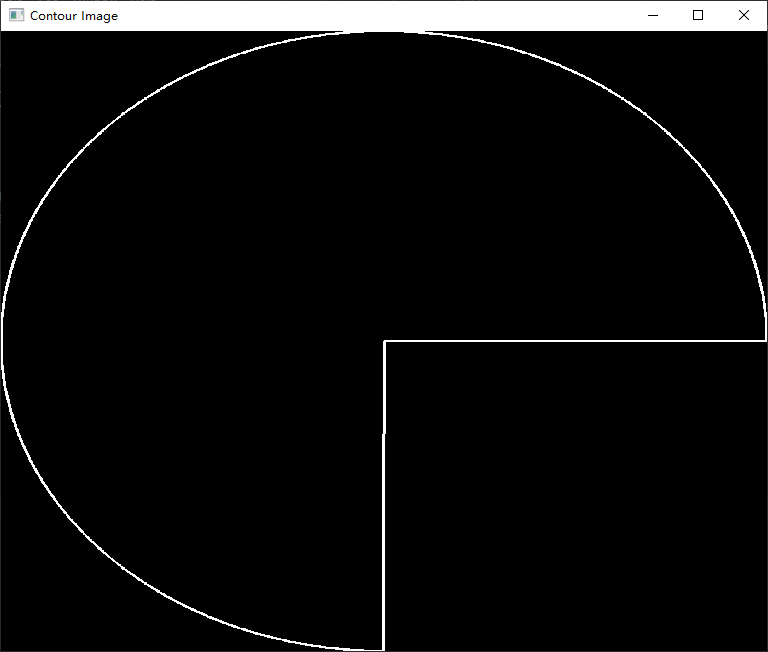
机器视觉之平面物体检测
平面物体检测是计算机视觉中的一个重要任务,它通常涉及检测和识别在图像或视频中出现的平面物体,如纸张、标志、屏幕、牌子等。下面是一个使用C和OpenCV进行平面物体检测的简单示例,使用了图像中的矩形轮廓检测方法:
#include &l…
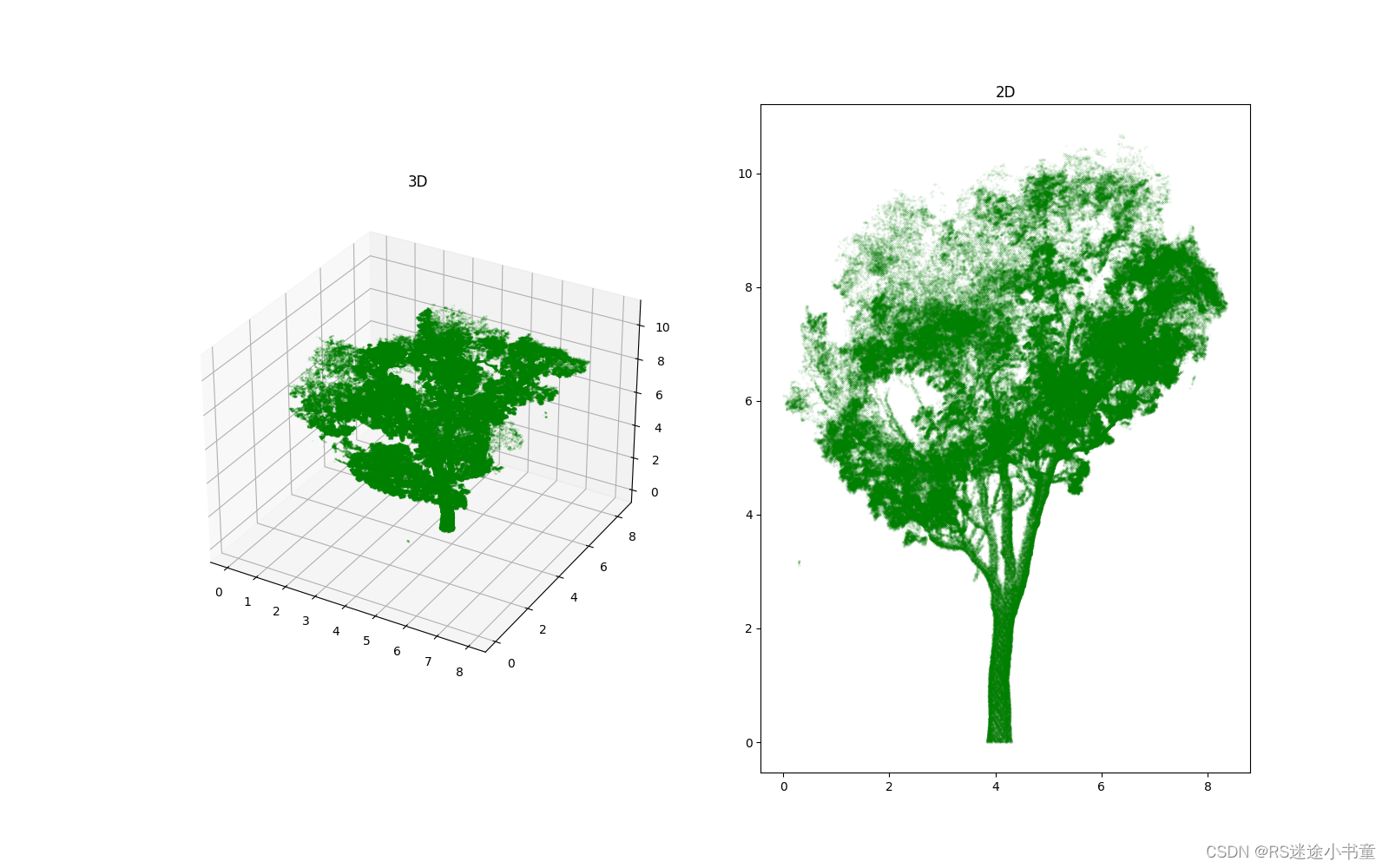
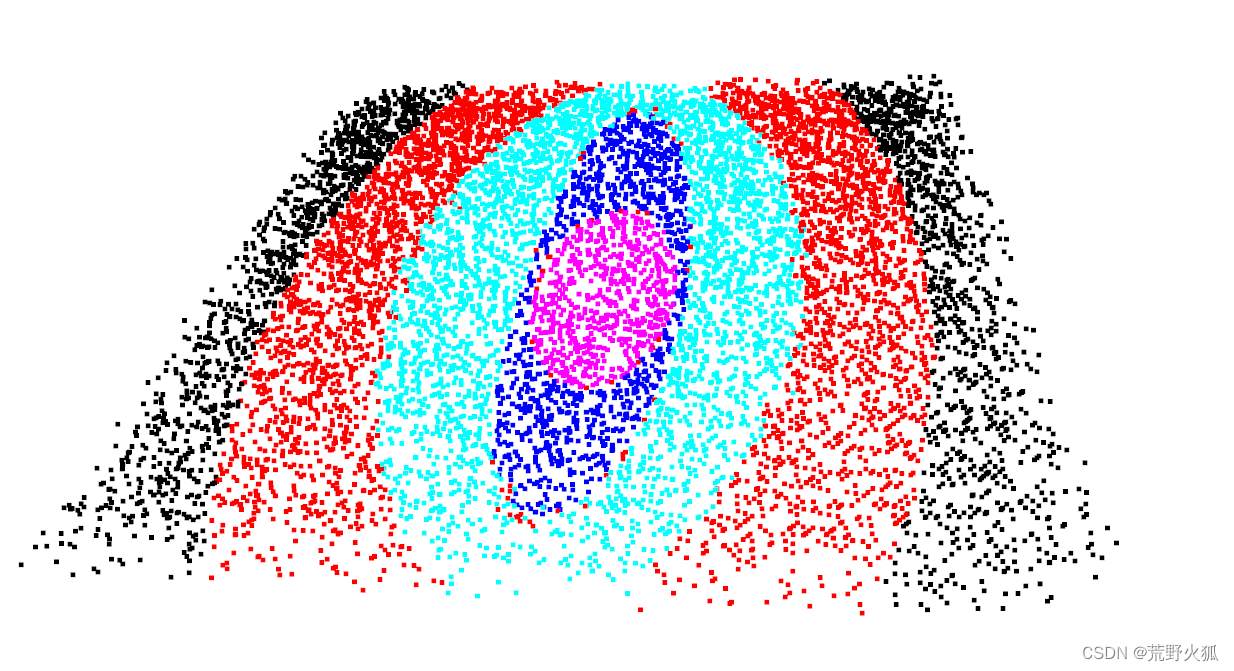
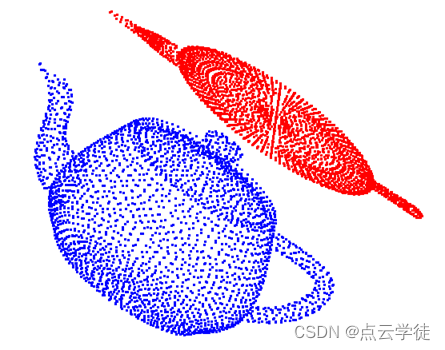
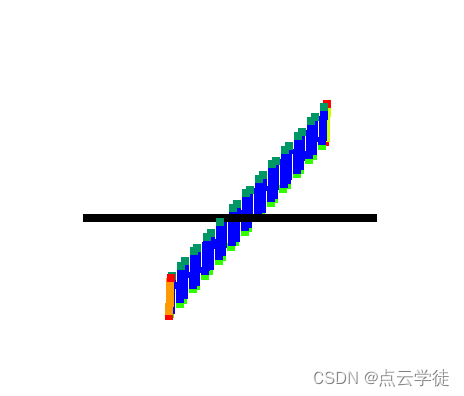
【Lidar】基于Python的三维点云数据转二维平面+散点图绘制
最近一直在搞点云相关的操作,有时候在处理点云数据时需要查看处理后的数据是否满足需求,所以就想着写一套展示点云的代码。之前已经分享过如何可视化点云了,感兴趣的可以自己去看下:【Lidar】基于Python的Open3D库可视化点云数据。…
差分信号的末端并联电容到底有什么作用?
差分信号的末端并联电容到底有什么作用? 在现代电子系统中,差分信号是一种常见的信号形式,它们通过两根互补的信号线传输信号,具有较低的噪声和更高的抗干扰能力。然而,当差分信号线长度较长或者遇到复杂的电路环境时&…
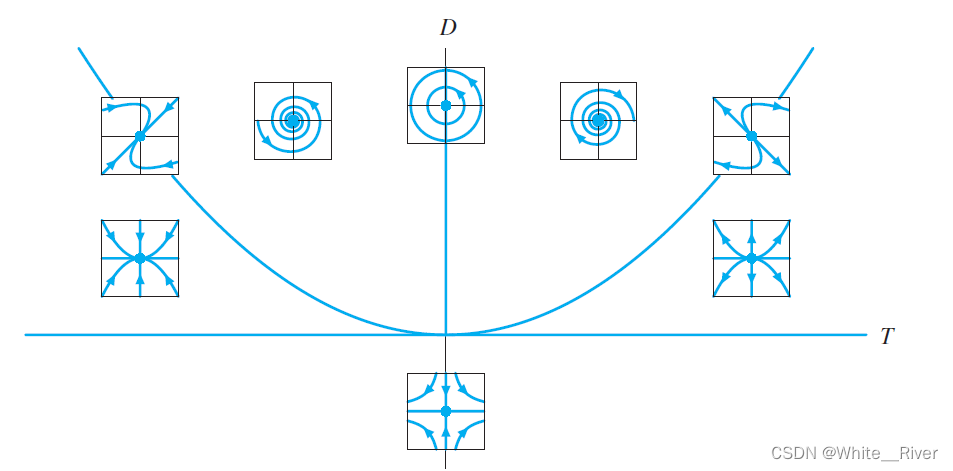
二阶系统的迹-行列式平面方法(trace-determinant methods for 2nd order system)
让我们再次考虑二阶线性系统 d Y d t A Y \frac{d\mathbf{Y}}{dt}A\mathbf{Y} dtdYAY
我们已经知道,分析这种二阶系统。最主要的是注意它的特征值情形。 (此处没有重根的情形,所有是partial)
而特征值,也就是系…
![[kubernetes]控制平面ETCD](https://img-blog.csdnimg.cn/direct/6858af04fb3946759018a87129e90959.png)
[kubernetes]控制平面ETCD
什么是ETCD
CoreOS基于Raft开发的分布式key-value存储,可用于服务发现、共享配置以及一致性保障(如数据库选主、分布式锁等)etcd像是专门为集群环境的服务发现和注册而设计,它提供了数据TTL失效、数据改变监视、多值、目录监听、…

Allegro无法和Capture交互的三种解决办法
Allegro无法和Capture交互的三种解决办法 在用Allegro进行PCB设计的时候,如果PCB和原理图能够交互的话,可以大大节省时间,提升设计效率。
但是有时候会因为某些原因无法实现Allegro和Capture交互,下面提供了三种方法,具体操作如下
方法一 打开Capture的原理图,点击生成…

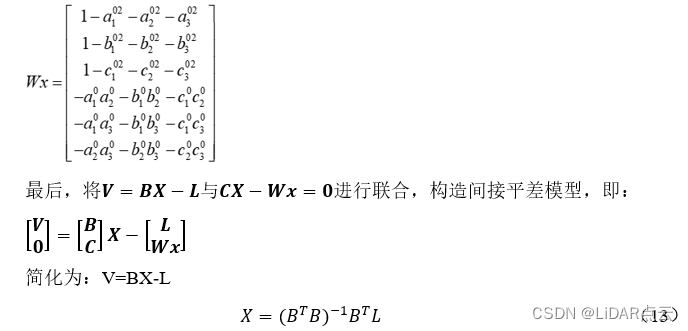
平面等几何分析C++程序理论推导
文章目录前言一、有限元等参四边形单元的等效节点力1.1 有限元等参四边形单元理论1.2 等参四边形单元的等效节点力二、等几何分析的等效节点力2.1 等几何分析的理论2.2 重构程序过程的理论推导2.2.1 重构程序原因2.2.2 全局节点编号与基函数的关系2.2.3 单元对应的参数域范围2.…
计算机网络之网络层:控制平面
五.网络层:控制平面
5.1 概述
转发表(在基于目的地的转发场景中)和流表(在通用转发的场景中)示的计算、安装、和维护有二种可能的方法
每路由器控制:每台路由器有一个路由选择组件,用于与其它…

一、【Photoshop如何根据不同类型图像抠图】
文章目录 前言图形结构1、规则图形2、不规则图形 图形颜色1、轮廓清晰2、颜色分明 前言
当我们有抠图需求的时候,不要一开始就想着我怎么去把它抠出来,首先应该分析图形的特点,然后再去选取合适的工具,这样才可以做到事半功倍&am…

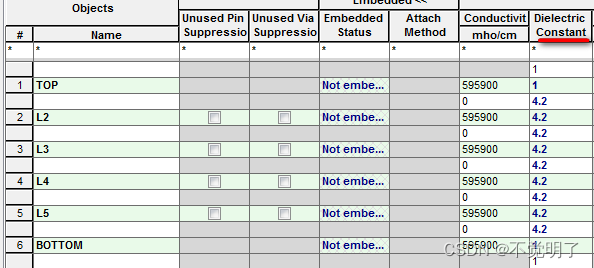
Allegro层叠中的介电常数如何填写指导说明
Allegro层叠中的介电常数如何填写指导说明 在用Allegro进行PCB设计的时候,需要在cross-section中设置好每个层的信息,包括层命名,每层的厚度等等信息。如下图 一般来说,这些信息就足够了
但是对于有仿真需求或者等长设计需要使用ps作为延时单位的设计的时候,需要额外在层…

用HFSS仿真平面线圈的电感量
用HFSS工具仿真平面线圈的电感量
平面线圈是指在平面上绕制而成的线圈,如PCB上的电感线圈、无线供电使用的金属丝绕制而成的线圈等。根据线圈的不同形状可将平面线圈分为方形线圈,六角形线圈、八角形线圈、螺旋原型线圈等。
网络上的计算平面线圈电感量…
[python][pcl]python-pcl案例之平面模型分割
测试环境:
pcl1.12.1
python-pcl0.3.1
python3.7
代码:
# -*- coding: utf-8 -*-
# http://pointclouds.org/documentation/tutorials/planar_segmentation.php#planar-segmentationimport pcl
import numpy as np
import randomdef main():# pcl…
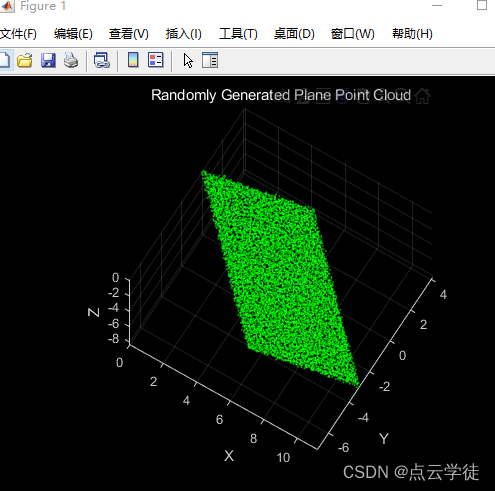
根据平面abcd 参数生成平面点云(附 open3d 代码)
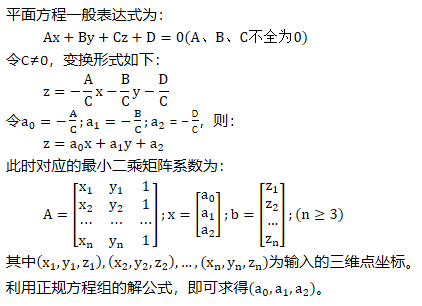
这段代码用于生成一个平面的点云数据,其中平面由参数化方程 Ax + By + Cz + D = 0 描述。
定义了平面的参数 `plane_params`。在给定的示例中,平面的参数是 `[1, 1, 1, 10]`,也就是 A=1,B=1,C=1,D=10。
接下来,定义了平面的长度和宽度,即 `plane_length` 和 `plane_w…
点云算法--拟合平面和拟合直线
下述是拟合平面:
template<class Vector3>
std::pair<Vector3, Vector3> best_plane_from_points(const std::vector<Vector3> & c)
{// copy coordinates to matrix in Eigen formatsize_t num_atoms c.size();Eigen::Matrix< Vector3…
容性耦合和距离的关系
容性耦合和距离的关系 在电路板设计中,耦合是指两个或多个电路元件之间的相互作用,这种相互作用会影响到电路的性能。而容性耦合是指通过电场进行耦合的一种方式,它可以通过电容器的作用使得信号在电路板中传递,但同时也会带来一些…
二十五、【色调调整基础】
文章目录 1、亮度/对比度a、亮度b、对比度 2、曝光度3、阈值4、色阶5、反相6、黑白7、渐变映射 1、亮度/对比度
a、亮度
亮度是指画面的明亮程度
b、对比度
对比度指的是一幅图像中,明暗区域最亮和最暗之间不同亮度层级的测量,如下图所示࿰…
流程图plantuml使用方法
这里写目录标题1.https://plantuml.com/zh/sequence-diagram1.https://plantuml.com/zh/sequence-diagram
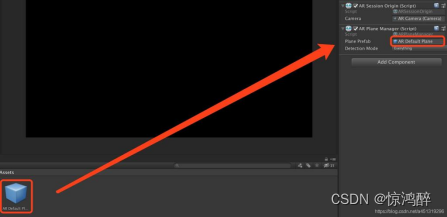
⭐ Unity + ARKIT 介绍 以及 平面检测的实现
在AR插件中,ARKIT是比较特殊的一个,首先他在很多追踪上的效果要比其他的AR插件要好,但是只能在IOS系统设备上运行。
1.首先ARKIT在最新版Unity已经集成在AR Foundation中,那我们就需要ARSession 和ARSessionOrigin这两个重要组件…
计算一个点在某平面中某条直线的投影
假设点 PPP 在平面 π\piπ 上,而直线 LLL 在平面 π\piπ 上与另一条直线 DDD 相交。要计算点 PPP 在直线 LLL 上的投影 QQQ,可以按照以下步骤进行:
计算直线 DDD 的方向向量 d⃗\vec{d}d,例如取直线 DDD 上的两个点 AAA 和 BBB…

十八、【模糊工具组】
文章目录 模糊工具锐化工具涂抹工具 模糊工具
使用模糊工具可以对图像边缘以及其他一部分区域进行编辑,可以使其变得模糊,从而更加突出主体: 锐化工具
锐化工具跟模糊工具是相反的一个工具啊,锐化工具主要是增强图像的颗粒度&am…
Allegro如何交换两个器件的位置操作指导
Allegro如何交换两个器件的位置操作指导 在用Allegro进行PCB设计的时候,交换两个器件的位置是使用的十分频繁的操作,如下图 需要将两个器件的位置交换,可以手动移动,然后交换下位置,但是Allegro支持快速将两个器件的位置对调
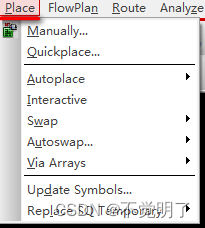
具体操作如下 点击Place点击Swap
计算机网络:网络层上(数据平面)
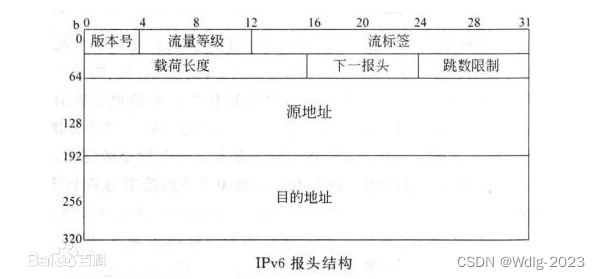
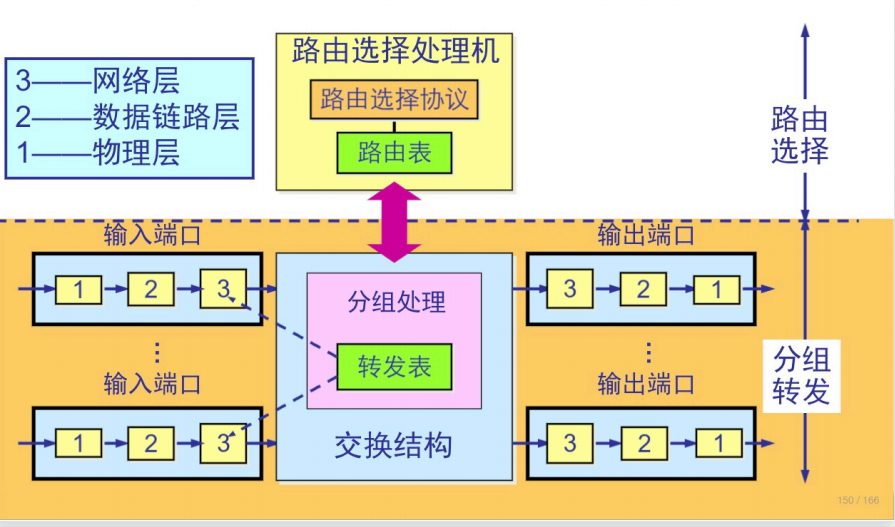
文章目录 前言一、概述1.网络服务模型2.连接建立 二、路由器组成1.路由器结构概况输入端口的功能 2.IP(Internet Protocol)IPV4IPV6 3.通用转发和SDN 总结 前言
网络层分两部分讲解,本篇文章讲解数据平面的内容:路由器组成、IP协…
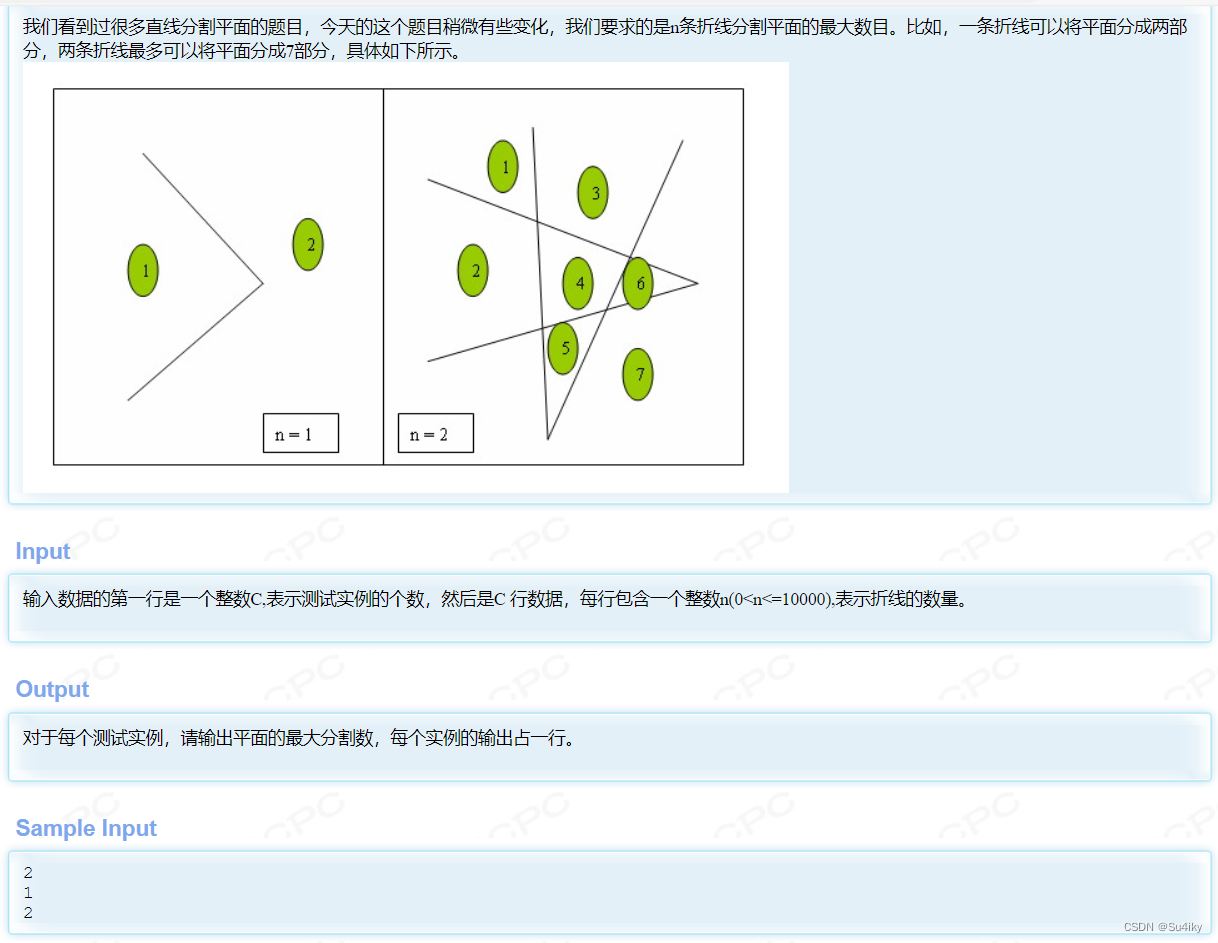
问题 U: 折线分割平面(类比+规律)
规律类比:
1.一个折线的角,只会对应一个部分
2.若反向延长,角对应的部分被分为3部分
(即一条折现线改为两条直线)
3.所以n条折线分成的平面数,等于2n条直线减去2n 代码实现:
Matlab 点云迭代加权最小二乘法拟合平面(抑制噪声)
不要虚掷你的黄金时代,不要去倾听枯燥乏味的东西,不要设法挽留无望的失败,不要把你的生命献给无知、平庸和低俗。这些都是我们时代病态的目标,虚假的理想。 ----王尔德 文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 受到之前博客的启发(Matlab 点云最小二乘…
CGAL 点云RANSAC提取平面
文章目录 一、简介二、相关参数三、代码实现四、实现效果参考资料一、简介 CGAL中,该方法将一组无法向量的点集作为输入,输出一组指定形状的点云。其中形状是通过ransac类型指定。基本的RANSAC方法重复以下步骤: 从输入点随机选取样本;为选定的样本拟合形状;计算形状的内部点…
Allegro如何导入第三方网表操作指导
Allegro如何导入第三方网表操作指导 在用Allegro做PCB设计的时候,除了支持第一方网表的导入,同样也是可以导入第三方网表的,第三方网表如下图 如何导入,具体操作如下 点击Setup点击User Preference
Allegro如何利用Create Bound Shape自动画铜皮操作指导
Allegro如何利用Create Bound Shape自动画铜皮操作指导 在做PCB设计的时候,画铜皮操作是时常需要用到的操作,对于非常规角度画铜皮是个比较麻烦的事情,在Allegro升级到了172版本的时候,有个Create Bound Shape命令,画异形铜皮十分快捷,如下图
贴着过孔的边缘画弧形的铜皮…

如何从PCB上直接启动Power DC直流压降仿真分析工具
如何从PCB上直接启动Power DC直流压降仿真分析工具 POWER DC的启动除了可以通过POWER DC.exe直接启动外,还可以直接通过Allegro的PCB界面直接启动,二者软件是支持关联的。如何启动,具体操作如下 用166或者172版本打开PCB点击File点击Change Edi
多源LiDAR传感器平面匹配与优化标定方法
提供的代码是一种使用平面提取和匹配以及随后的Ceres Solver库优化转换的LiDAR标定方法的全面实现。这种方法用于对齐多个LiDAR传感器的数据,比如那些安装在车辆或机器人不同位置的传感器,以确保它们生成的点云在同一坐标系统中。 以下是对代码及其实现的标定方法的介绍: 利…
7款最佳的图片编辑App
无论你是设计师需要调整界面图片大小,还是摄影师需要剪图片,追求完美的比例,还是日常照片,需要P图片,或多或少会有剪图片的需求,如何选择一个简单和轻的剪图软件应用程序,不是一件容易的事情。本…
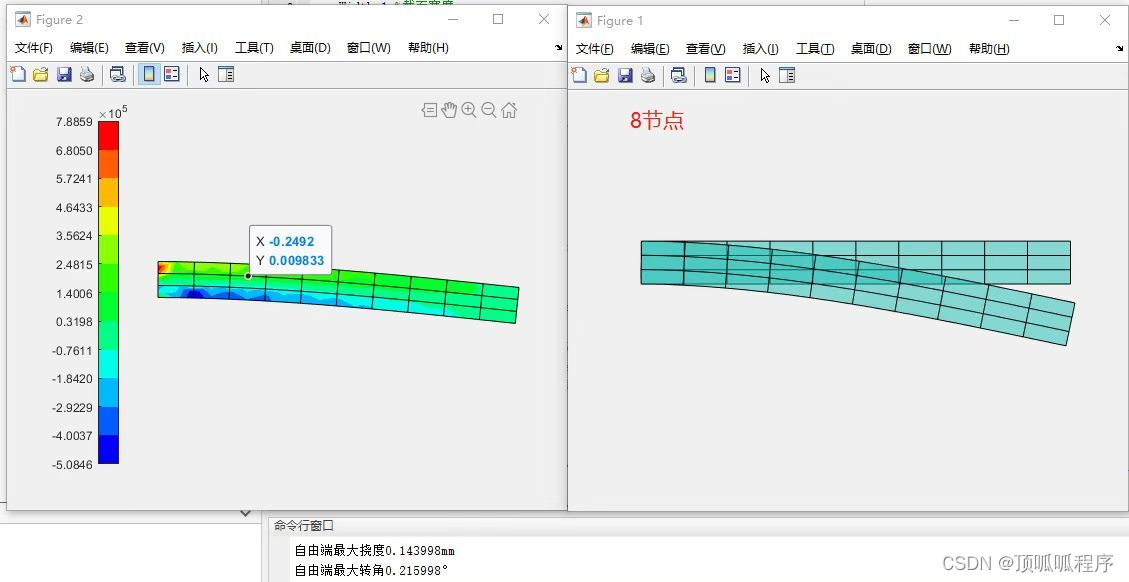
10基于matlab的悬臂梁四节点/八节点四边形单元有限元编程(平面单元)
悬臂梁,有限元编程。基于matlab的悬臂梁四节点/八节点四边形单元有限元编程(平面单元),程序有详细注解,可根据需要更改参数,包括长度、截面宽度和高度、密度、泊松比、均布力、集中力、单元数量等。需要就拍…
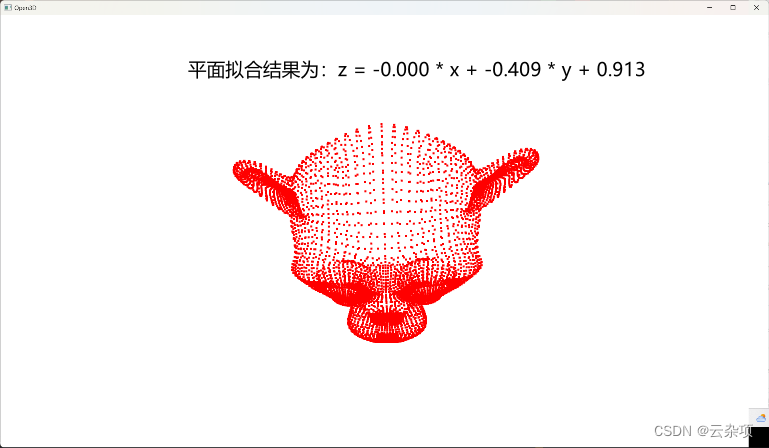
MATLAB 平面拟合并旋转到水平面 (43)
MATLAB 平面拟合并旋转到水平面 (43) 一、算法介绍二、算法实现1.代码2.结果一、算法介绍 点云拟合平面并置平的算法是指对给定的点云数据进行平面拟合,并将拟合得到的平面调整至水平位置的过程。这个算法通常用于处理三维空间中的点云数据,例如在计算机视觉、三维重建和机…
10个设计人士应该关注的国内外资源网站
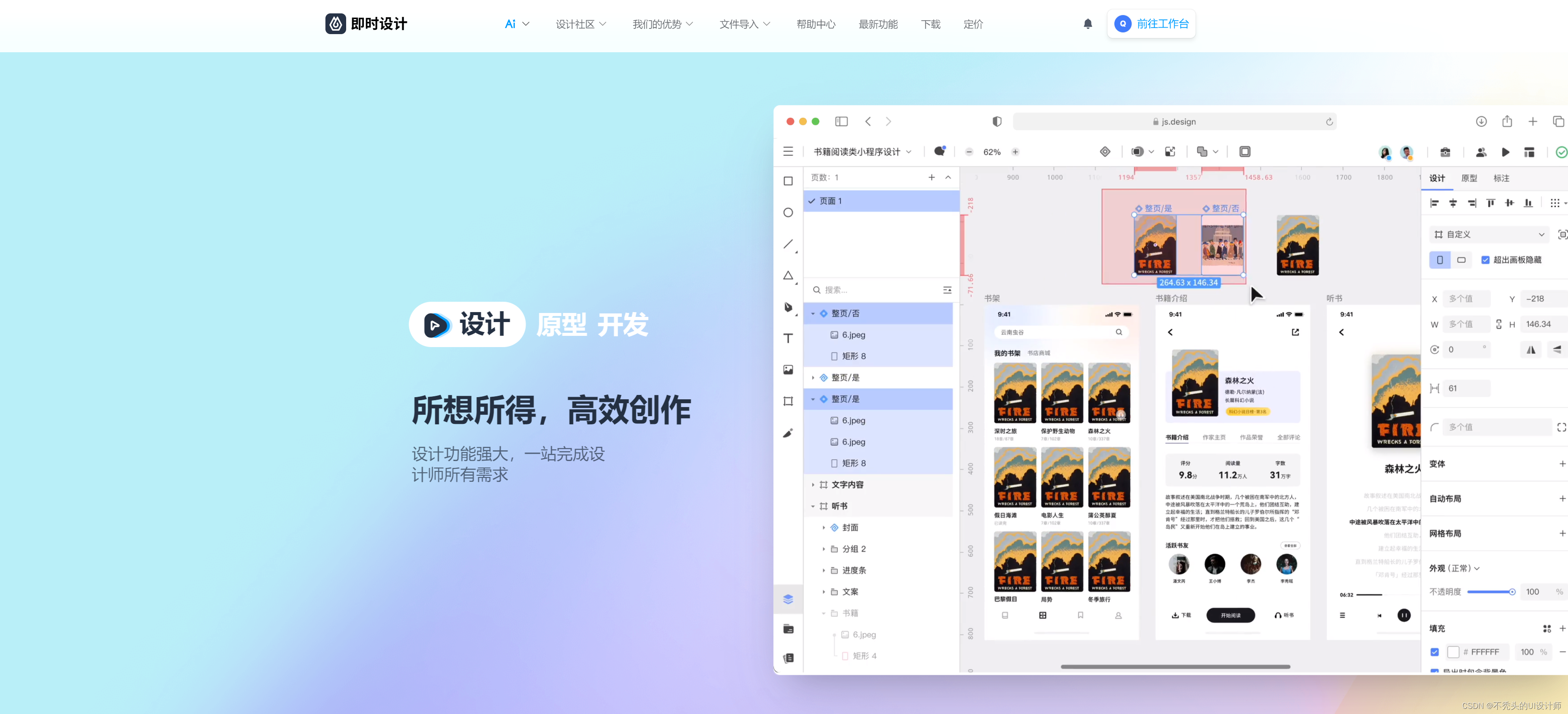
设计师网站1:即时设计
即时设计内拥有上万款来自于优秀设计师的精美设计作品,包括设计规范、页面、插画、图标、产品原型、作品集等等,这些作品往往都是由大厂团队精心总结的设计规范,对应着完善的设计系统与配套组件库。除此之外…
第五章-数字水印-1-位平面
数字水印概念
数字水印是一种将特定数字信息嵌入到数字作品中从而实现信息隐藏、版权认证、完整性认证、数字签名等功能的技术。
以图片水印为例:
水印嵌入过程:版权信息水印A嵌入到图像B中,得到含有水印的图像C,图像C与图像B在外观上基本一致,肉眼无法区分差异。…
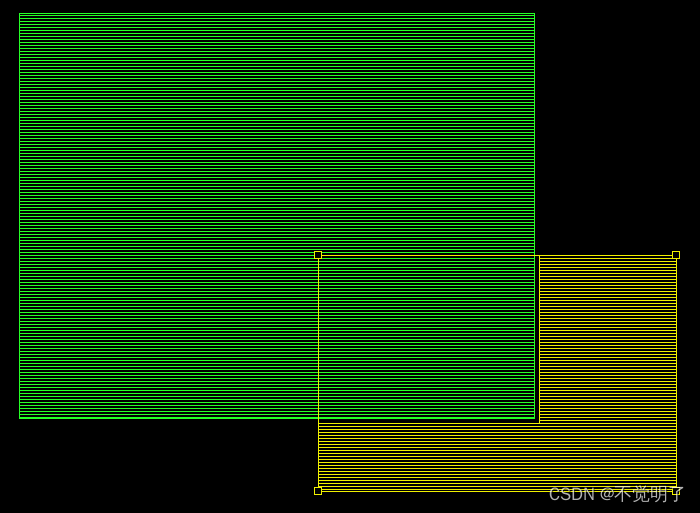
Allegro如何实现同一个屏幕界面分屏显示操作指导
Allegro如何实现同一个屏幕界面分屏显示操作指导 在做PCB设计的时候,会需要分屏显示,比如一边是放大的视图,另外一边是缩小的视图,Allegro支持同一个屏幕界面下进行分屏显示,如下图 而且会实时同步起来 如何分屏,具体操作如下 点击View
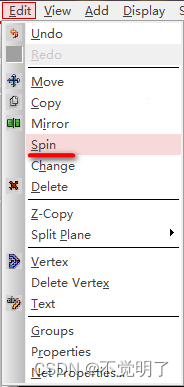
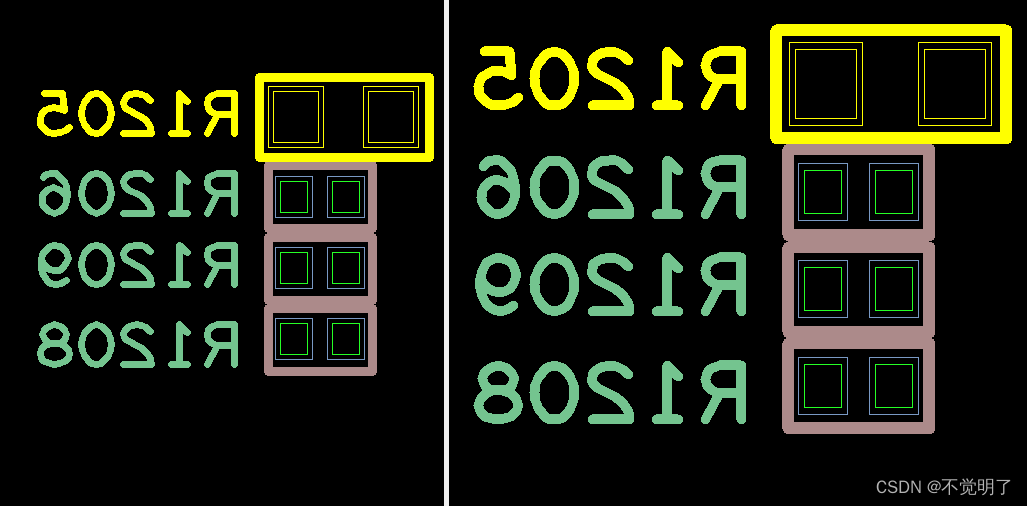
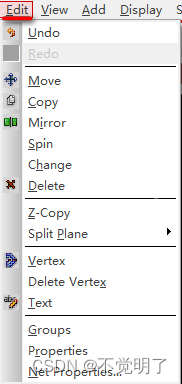
Allegro如何快速将目标旋转90度操作指导
Allegro如何快速将目标旋转90度操作指导 在用Allegro进行PCB设计的时候,时常需要目标旋转90度,我们常用的命令是Spin,如下图以旋转电阻为例 点击Edit点击SpinOp
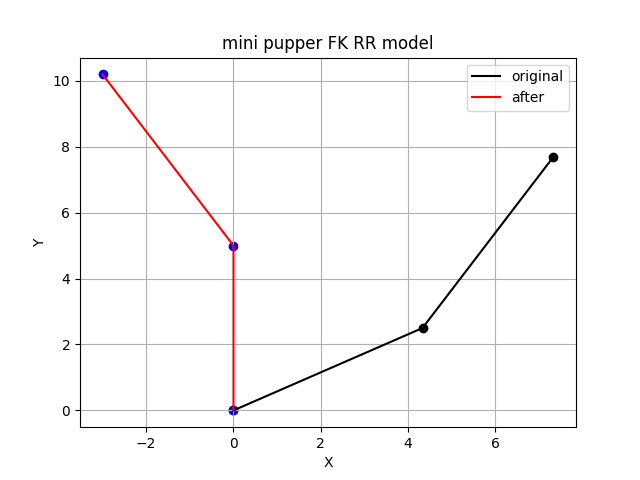
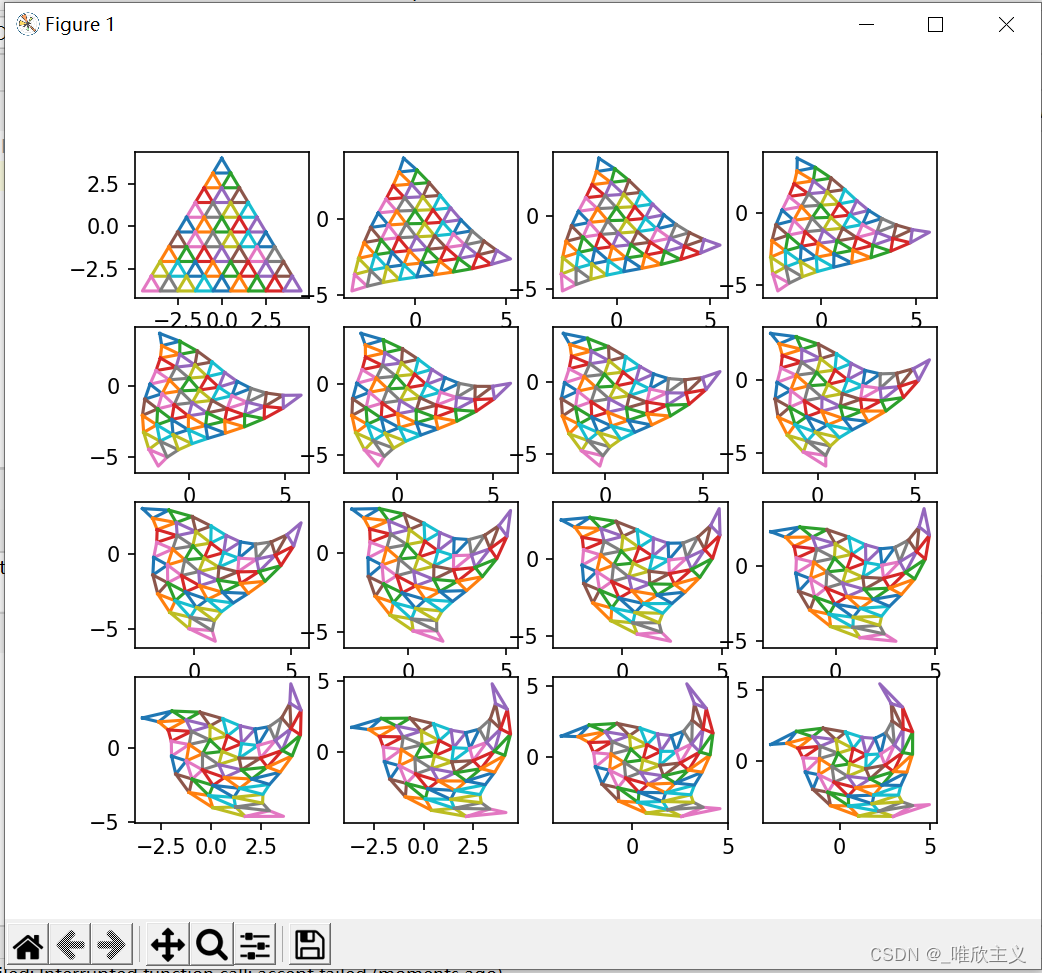
实例9:四足机器人运动学正解平面RR单腿可视化
实例9:四足机器人正向运动学单腿可视化
实验目的
通过动手实践,搭建mini pupper四足机器人的腿部,掌握机器人单腿结构。通过理论学习,熟悉几何法、旋转矩阵法在运动学正解(FK)中的用处。通过编程实践&…
【计算机网络】网络层:数据平面
一.网络层概述
每台路由器的数据平面的主要功能时从其输入链路向其输出链路转发数据报,控制平面的主要功能是协调这些本地的每路由转发动作,使得数据报沿着源和目的地主机之间的路由器路径最终进行端到端传送。 网络层不运行运输层和应用层协议。 转发是…
[python][pcl]python-pcl案例之为平面模型构造凹凸外壳多边形
测试环境:
pcl1.12.1
python-pcl0.3.1
python3.7
代码:
# -*- coding: utf-8 -*-
# Construct a concave or convex hull polygon for a plane model
# http://pointclouds.org/documentation/tutorials/hull_2d.php#hull-2dimport numpy as np
imp…
【Cesium】模型平面裁切
const scene viewer.scene;let tileset;
let targetY 400.0;
let planeEntities [];
let selectedPlane; // 选择的切面
let clippingPlanes; // 切面属性// 当鼠标点击切面时,修改相关属性
const downHandler new Cesium.ScreenSpaceEventHandler(viewer.sce…
Qt 2D图形平面绘制
Qt 2D图形平面绘制一、图形视图框架 Graphics View Framework二、实战1. 步骤2. 代码三、参考四、总结一、图形视图框架 Graphics View Framework QGraphicsScene 场景 QGraphicsScene用作图形项的容器,提供一个容纳和管理大量2D图形项的平面。 例如: 线条、矩形、文…

Allegro如何将丝印文字Change到任意层面操作指导
Allegro如何将丝印文字Change到任意层面操作指导 在用Allegro进行PCB设计的时候,有时需要将丝印文字change到其它层面,如下图 可以看到丝印文字是属于REFDES这个Class的 如果需要把丝印文字change层面,只支持REFDES中以下的层面中来change
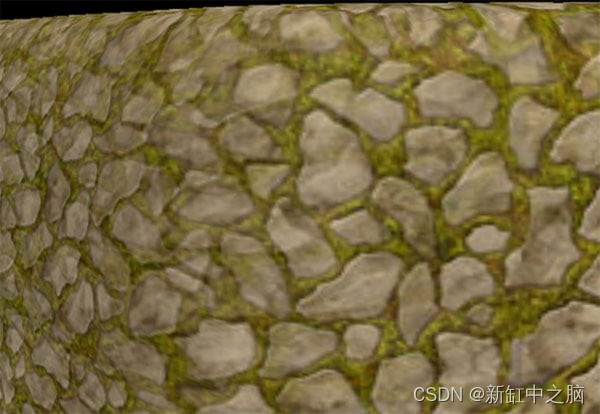
基于三平面映射的地形纹理化【Triplanar Mapping】
你可能遇到过这样的地形:悬崖陡峭的一侧的纹理拉伸得如此之大,以至于看起来不切实际。 也许你有一个程序化生成的世界,你无法对其进行 UV 展开和纹理处理。 推荐:用 NSDT编辑器 快速搭建可编程3D场景 三平面映射(Trip…

Allegro如何输出ODB文件操作指导
Allegro如何输出ODB文件操作指导 在PCB设计完成之后,需要输出生产文件用于生产加工,除了gerber文件可以用生产制造,ODB文件同样也可以用于生产,如下图 用Allegro如何输出ODB文件,具体操作如下 首先确保电脑上已经安装了ODB这个插件,版本不受限制点击File
《计算机网络:自顶向下方法》第五章--网络层:控制平面
控制平面作为一种网络范围的逻辑,不仅控制沿着从源主机到目的主机的端到端路径间的路由器如何转发数据报,而且控制网络层组件和服务如何配置和管理
传统上,控制平面功能与数据平面的转发功能在一起实现,在路由器中作为统一的整体…
Allegro如何设置铜皮避让的优先级操作指导
Allegro如何设置铜皮避让的优先级操作指导 在用Allegro进行PCB设计的时候,时常需要使用动态铜皮进行设计,当两块动态铜皮存在交集的时候,避让就会存在一个优先级,如下图 上方的铜皮避让调了下方的铜皮,上方的铜皮被避让了
如何调整让下方的铜皮避让上方的铜皮,如下图 具…
4.网络层:数据平面
1.网络层概述网络中的每台主机和路由器之间都有一个网络层路由器具有截断的协议栈,没有网络层以上的部分因特网的网络层提供单一的服务,称为尽力而为服务,看起来是根本无服务的委婉说法数据平面:从输入链路向输出链路转发数据报控…
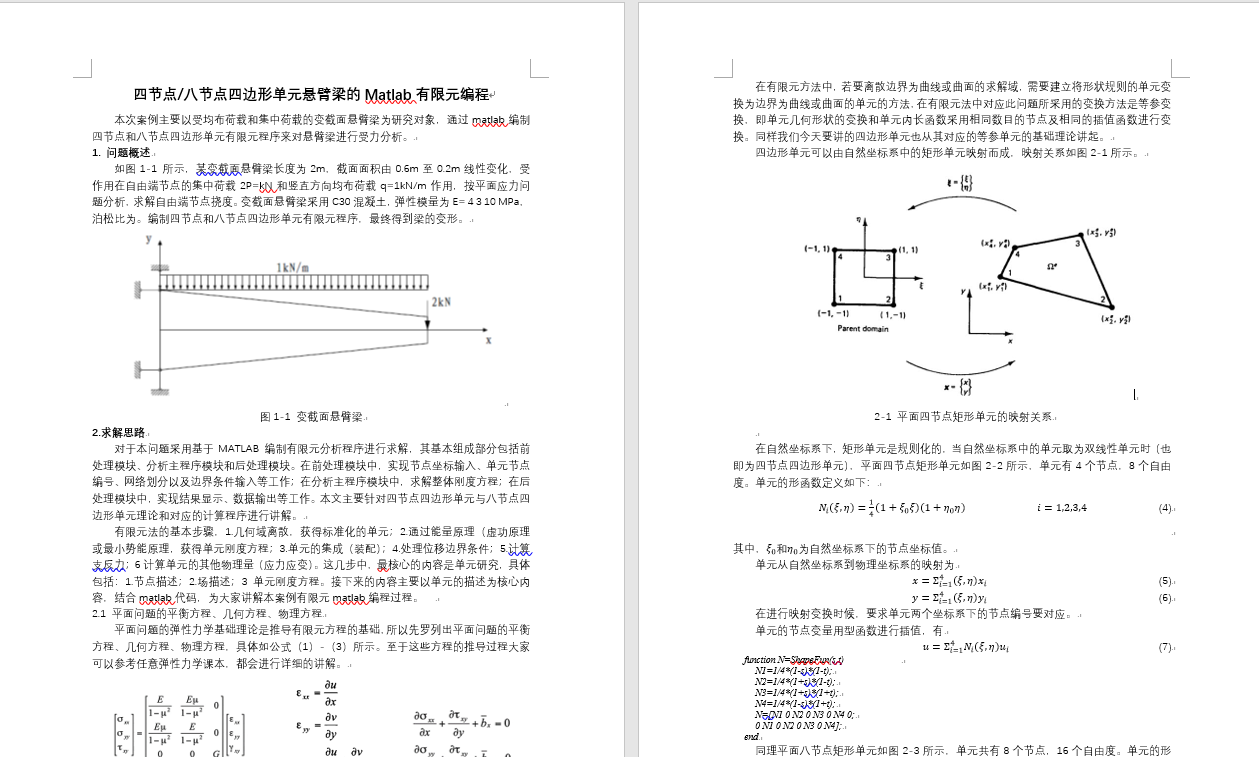
四节点/八节点四边形单元悬臂梁Matlab有限元编程 | 平面单元 | Matlab源码 | 理论文本
专栏导读 作者简介:工学博士,高级工程师,专注于工业软件算法研究本文已收录于专栏:《有限元编程从入门到精通》本专栏旨在提供 1.以案例的形式讲解各类有限元问题的程序实现,并提供所有案例完整源码;2.单元…
【点云】生成有凹凸的平面
文章目录 前言高斯函数原理代码保存 测试测试1 :领域曲率代码测试2:高斯曲率代码 加上噪点测试1测试2改进 前言
尝试用一些数据生成有凹凸面的点云。 我们姑且把z轴当成有凹凸的缺陷,x轴和y轴共同组成一个平面。 高斯函数
原理
高斯函数wi…
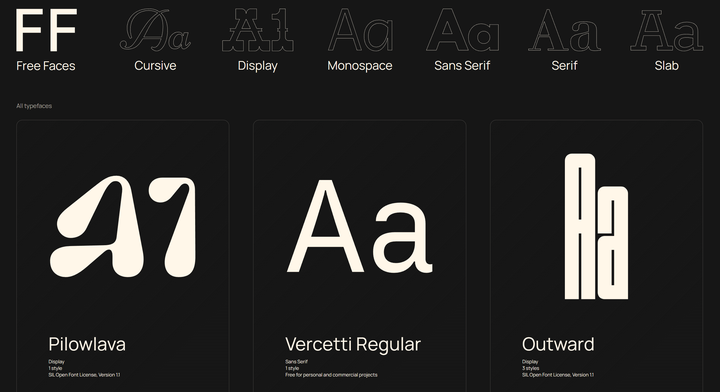
免费商用字体,进来领取!!!
如果你不知道去哪里找免费可商用字体,那一定要收藏好这几个网站,全部都是免费无版权字体,以后再也不用担心侵权问题了。 1、免费字体网
https://font.sucai999.com/ 一个免费可商用字体搬运工,实时跟新市面上免费商用的字体。网站…
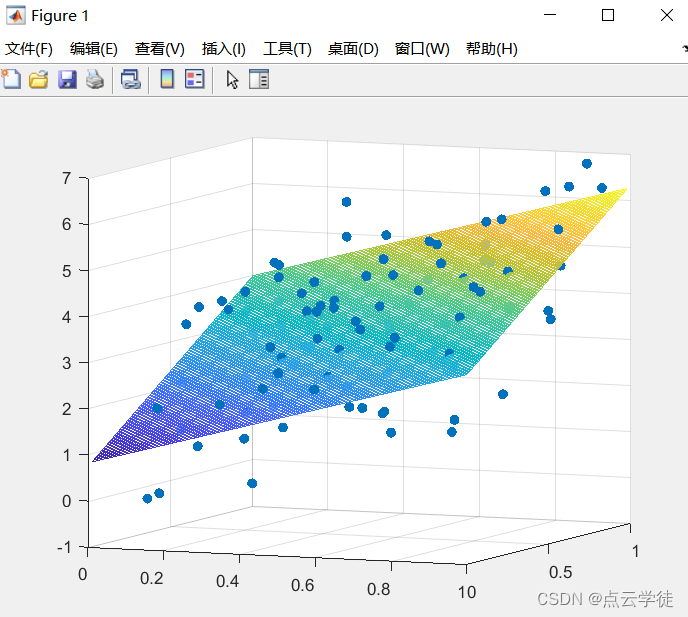
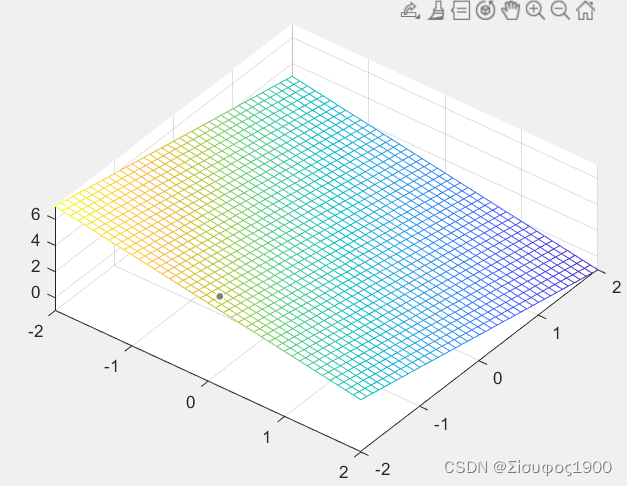
MATLAB 平面拟合并可视化(34)
MATLAB 平面拟合并可视化(34) 一、效果二、代码一、效果 二、代码
% 生成三维点数据
x = rand(100, 1);
y = rand(100, 1
麓言信息 平面设计师必备的十大技能
1.有风格相对于无风格 风格可以被当做一个设计师的签名。如果你的设计有特定的受众。那么受众所熟悉的风格会成为你重要的设计工具。每个设计师都应该有属于自己的风格。因为你参与的每个项目都是独一无二的,你的风格会在受众中留下深刻的影响。大部分设计师&…
平面设计师之路 优漫动游
1、入门
平面设计师之路 首先将几个原则,不管你记得住记不住,这些方式和态度决定了你能够深入到平面设计的哪一步。 原则一:实践是掌握真理的唯一途径。这句话是衍生物,因为我觉得原来的那句话实验性质太浓厚了,…
Allegro移动器件时附带的孔和线被同步更改的原因和解决办法
Allegro移动器件时附带的孔和线被同步更改的原因和解决办法 用Allegro做PCB设计的时候,移动器件的时候,会出现附带的孔和线也会被同步更改,有时并不是期望的效果,如下图 Allegro其实将这个功能关闭即可,具体操作如下 选择Edit点击Move命令

下载免费商用字体,就上这6个网站。
我不允许还有人不知道,这些可以免费下载商用字体的网站,必须收藏好了,有了这6个网站,再也不用担心字体侵权了。 1、字体搬运工
https://font.sucai999.com/ 一个免费可商用字体搬运工,实时跟新市面上免费商用的字体。…

一、【海报合成的流程】
文章目录 主体创意草图素材拼图光影调色 主体
首先联想主体相关的关键词
创意
将联想到的关键词,串起来生成创意
草图
结合主体跟创意,我们先绘制一幅草图。草图可以是简单的图形,然后组成大概的结构布局。
素材
根据草图去寻找我们需…
【计算机网络】网络层-数据平面(学习笔记)
一、网络层提供的服务
1、虚电路服务
通讯前建立虚电路,发送前认为选择路径,所以分组沿着同一条虚电路。
特点:带宽固定 2、数据报服务
数据可能沿着不同路径传输 3、网络层的两个层面
数据层面:源主机到目标主机
控制层面&…
pcl matlab 计算平面与空间三角形的交线
一、生成一个平面 过程: 单有法向量不能确定一个平面,至少还要有平面上的一个点的坐标才行 假如知道法向量n(A,B,C) 而平面过某点M(x0,y0,z0) 那么平面的方程为 A(x-x0)B(y-y0)C(z-z0)0 要在图中画出来,那么先要给x,y一个范围 举个离子&#…
CGAL Mesh网格裁切(基于平面)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 CGAL中并不存在真正的平面与Mesh的裁切功能,CGAL的是将平面转换为一个TriangleMesh(三角网格),之后将其与我们输入的Mesh数据求交集来获取最终的裁切数据。大致的过程如下所述: 首先,CGAL会求出Mesh数据的包围…
Unity求向量A在平面L上的投影向量
如题:求向量A在平面L上的投影向量(图左) 即求 其实等价于求向量,那在中,,所以只需要求即可
而就是在平面L的法向量的投影坐标,所以代码就是 /// <summary>/// 求向量A在平面B上的投影向量/// </summary>/// <para…

码蹄集新手村:绝对值,输入各种类型数,平面、空间三角形面积(坐标)
1.绝对值
虽然用if else判断是否小于0,小于0取相反数也能解决,但可能会出现错误,尽量用fabs()函数
2. 输入各种类型数所需的常见英文字母
字符 %c
double %lf
float %f
3.平面三角形面积(坐标) 记住三角形面积公…

CSS 实现平面圆点绕椭圆动画
前言
👏CSS实现平面圆点绕椭圆动画,速速来Get吧~ 🥇文末分享源代码。记得点赞关注收藏!
1.实现效果 2.实现原理
transform-style:CSS 属性 transform-style 设置元素的子元素是位于 3D 空间中还是平面中。如果选择平面…
Cinema 4D R20 安装教程【64位】
C4D全名baiCINEMA 4D
德国MAXON出的3D动画软体。Cinema4D是一个du老牌的三维软件。能够进zhi行顶级的建模、动画和渲染dao的3D工具包. 【软件名称】: C4D R20(64位) 【软件大小】:8.72GB 【系统要求】:win7/win8/win1…

3D点云测量:计算三个平面的交点
文章目录 0. 测试效果1. 基本内容文章目录:3D视觉测量目录0. 测试效果 1. 基本内容 计算三个平面的交点需要找到满足所有三个平面方程的点。三个平面通常由它们的法向量和通过它们的点(或参数形式的方程)来定义。以下是计算三个平面的交点的一般步骤:
假设有三个平面,分别…



【中文版ChatGPT4.0!国内可直接用】
中文版ChatGPT4.0!国内可直接用 文心一言微软Copilot迅捷AI写作 在国内使用ChatGPT 4.0可能需要支付每月20美元的费用,约合人民币145元。如果不愿意付费,也可以考虑使用其他免费的AI工具。
目前有许多公司在研发出色的AI大模型,这…
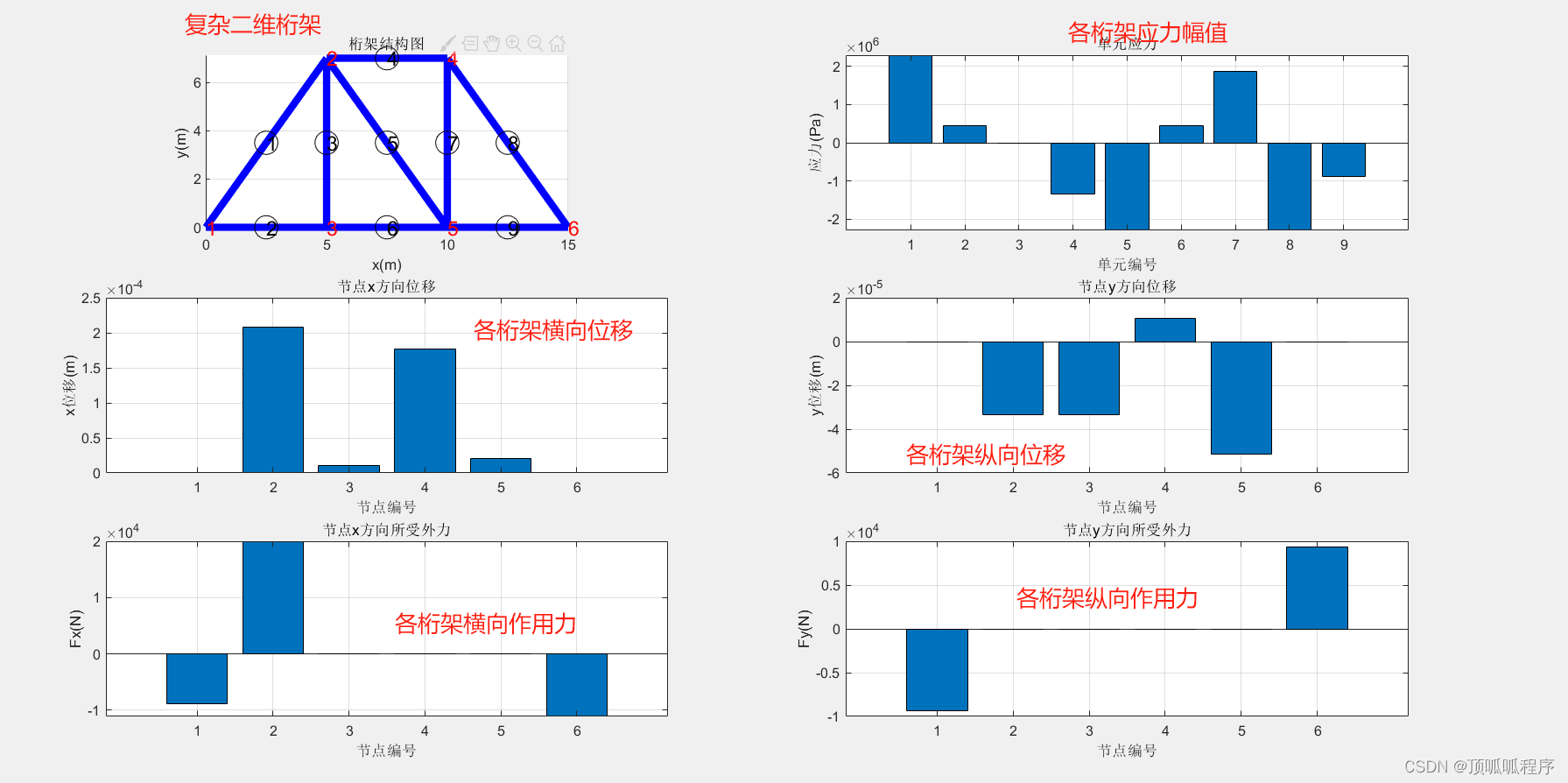
143基于matlab的2D平面桁架有限元分析
基于matlab的2D平面桁架有限元分析,可以改变材料参数,输出平面结构外形,各桁架应力,位移及作用力。可查看节点力,程序已调通,可直接运行。 143 matlab 平面桁架 有限元分析 桁架应力 (xiaohongshu.com)

点云平面拟合新国标怎么应对?
文章目录 一、应用背景二、算法原理三、代码实现首先我们看一下平面度的概念: 平面度:测量点集合中,在平面上方且距离基准平面最远的点到平面的距离+在平面下方且距离基准平面最远的点到平面的距离。 一、应用背景
在旧标准中,使用最小二乘法去拟合全部点,以拟合平面作为…
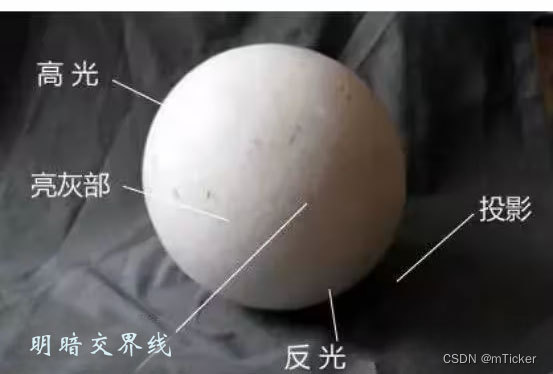
二十四、【参考素描三大面和五大调】
文章目录 三种色面(黑白灰)五种色调 这个可以参考素描对物体受光的理解:素描调子的基本规律与素描三大面五大调物体的明暗规律
三种色面(黑白灰)
如下图所示,我们可以看到光源是从亮面所对应的方向射过来的,所以我们去分析图形的时候,首先要…
空间直角坐标系、大地坐标系、平面坐标系介绍
空间直角坐标系、大地坐标系、平面坐标系
2017-04-11 13:53
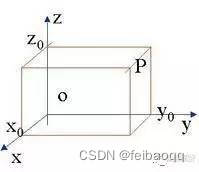
( 一)空间直角坐标系
空间直角坐标系的坐标原点位于参考椭球的中心,Z轴指向参考椭球的北极,X轴指向起始子午面与赤道的交点,Y轴位于赤道面上切按右手系于X轴呈90度夹角,某点中的坐标可用该点在此坐标系的各…
十九、【减淡工具组】
文章目录 减淡工具加深工具海绵工具 减淡工具
减淡工具的作用就是把画笔涂抹过后的区域的颜色减淡,让这部分区域的颜色看起来更加白更加亮: 也可以采用新建空白图层,然后采用画笔工具,用涂抹中性灰的方式让其变亮,采…

冲刺十五届蓝桥杯P0006平面切分
文章目录 题目思路代码总结 题目
平面切分
思路
这道题是一个思维题把,之前没有接触过平面几何的知识,做起来感觉还是比较难的,用到的set集合和自己创建一个类
首先我们知道,一根直线A是可以将平面切分成两块的,如…
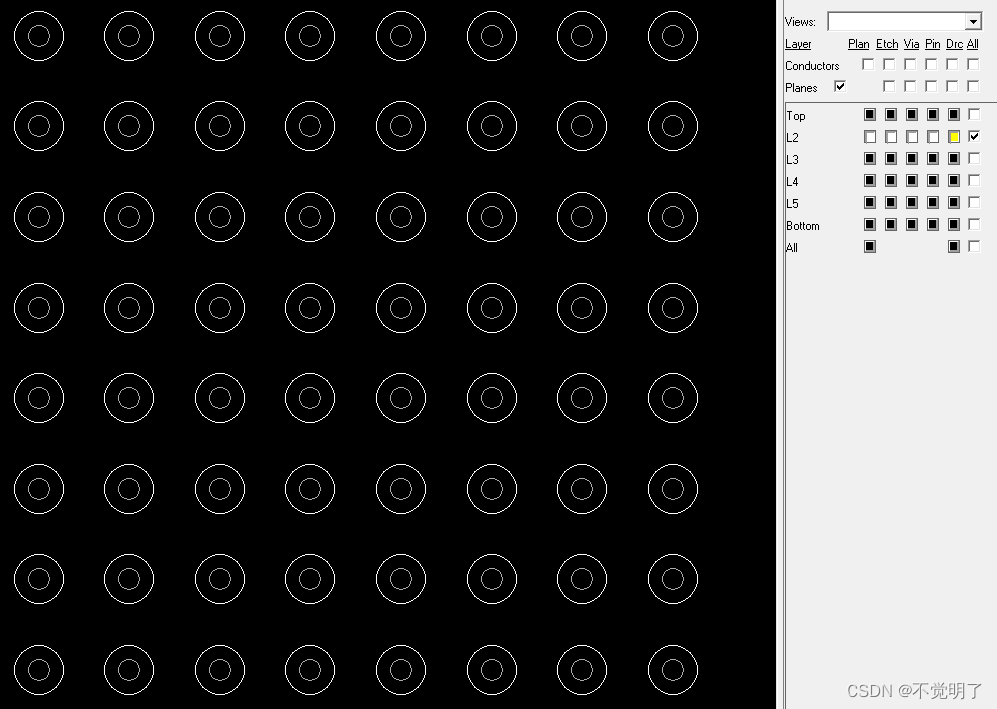
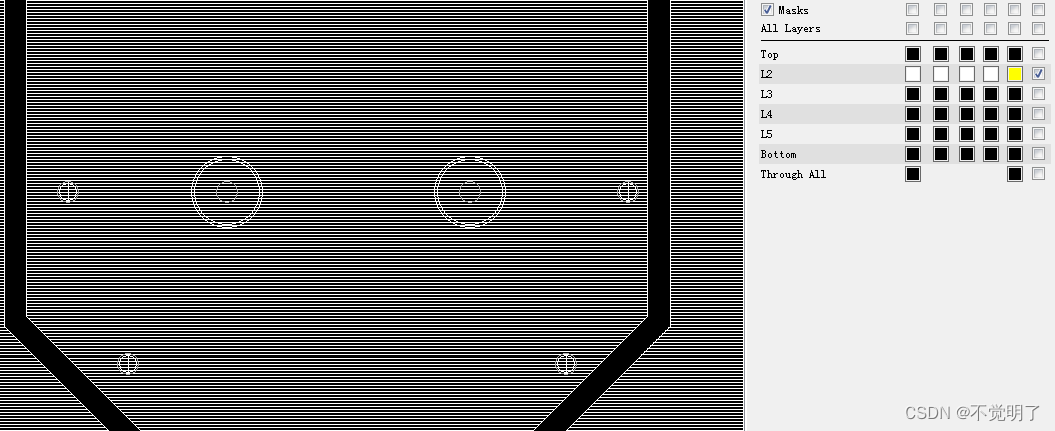
Allegro负片层不显示反盘的原因和解决办法
Allegro负片层不显示反盘的原因和解决办法 在用Allegro做PCB设计的时候,负片设计是较为常用的一种方式,有时会出现打开负片层却看不到反盘的情况,如下图
L2层是负片层 L2层仍然只能看到盘 如何才能看到反盘显示的效果,具体操作如下 首先确定L2层层叠里面设置的是负片
7.4 平面及其方程
🙌作者简介:数学与计算机科学学院出身、在职高校高等数学专任教师,分享学习经验、生活、 努力成为像代码一样有逻辑的人! 🌙个人主页:阿芒的主页 ⭐ 高等数学专栏介绍:本专栏系统地梳理高等数学…
找免费商用字体,就上这5个网站,再也不怕侵权了。
很多新手设计师没有版权意识,网上找了字体直接使用结果被发律师函,造成巨大损失,建议大家使用前先去查询一下这款字体是否能商用,另外就是去找一些可以免费商用的字体使用。如何才能找到免费商用字体呢?
下面我就把我…
Allegro172版本如何用自带功能改变过孔网络属性操作指导
Allegro172版本如何用自带功能改变过孔网络属性操作指导 在用Allegro做PCB设计的时候,时常会需要将过孔的网络进行变更,可以将原来的过孔删除,再重新打一个,这种方法难免会繁琐一些。
当然我们可以借助skill工具来完成更换过孔网络的更改,除此之外,Allegro自带的功能完成…
设计个性化名片的秘诀,附带5个热门设计工具
如何制作名片?一般用于名片设计的软件无非是Photoshopp、CorelDRAW、AdobeIllustrator,这样的软件使用成本和学习成本对于没有设计基础的普通人来说并不一定要花费时间和精力。所以,如果有现成的名片模板,只需要修改文本信息&…

这6个免费设计素材网站,设计师都在用,马住
新手设计师不知道去哪里找素材,那就看看这几个设计师都在用的网站吧,免费、付费、商用素材都有,可根据需求选择,赶紧收藏~
菜鸟图库
https://www.sucai999.com/?vNTYxMjky 菜鸟图库是一个非常大的素材库,站内包含设…

Allegro172版本不显示Microvia间距规则的解决办法
Allegro172版本不显示Microvia间距规则的解决办法 在用Allegro进行PCB设计的时候,进行盲埋孔单板设计的时候,有时会使用到Microvia,当然就要对Microvia进行规则设置,如下图 Allegro166版本的时候,Microvia规则是一直存在的
但是当版本升级到了172的时候,会发现Microvia的…

设计师必备的PNG免抠素材网站,告别PS手动抠图~
PNG素材最方便的是不用特意去抠图,就能与背景融合。设计师经常需要用到大量的PNG素材,一个一个去抠真的麻烦还浪费时间。下面就给大家推荐几个PNG图片网站,可以商用,以后就告别PS抠图吧~
1、菜鸟图库
https://www.sucai999.com/…
C++编程题目------平面上的最接近点对(分治算法)
题目描述
给定平面上n个点,找出其中的一对点的距离,使得在这n个点的所有点对中,该距离为所有点对中最小的。
输入格式
第一行一个整数 n,表示点的个数。
接下来 n 行,每行两个实数 x,y ,表示一个点的行…
不可错过的设计工具!7款亲测好用的网页设计工具推荐!
网页设计并不容易,易于使用的网页设计工具更难找到。随着网络的快速发展,网站迅速崛起,网页设计也很流行。本文收集了 7 种良心和易于使用的网页设计工具,每一种近年来都受到网页设计师的广泛欢迎,以确保实用和易于使用…
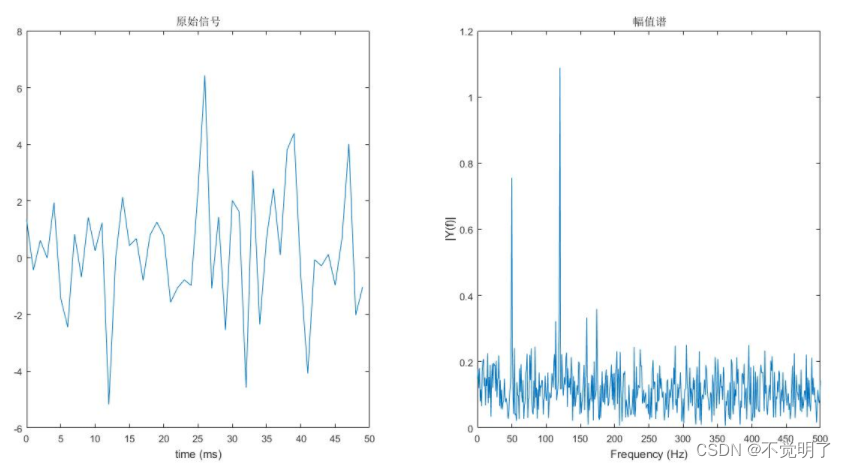
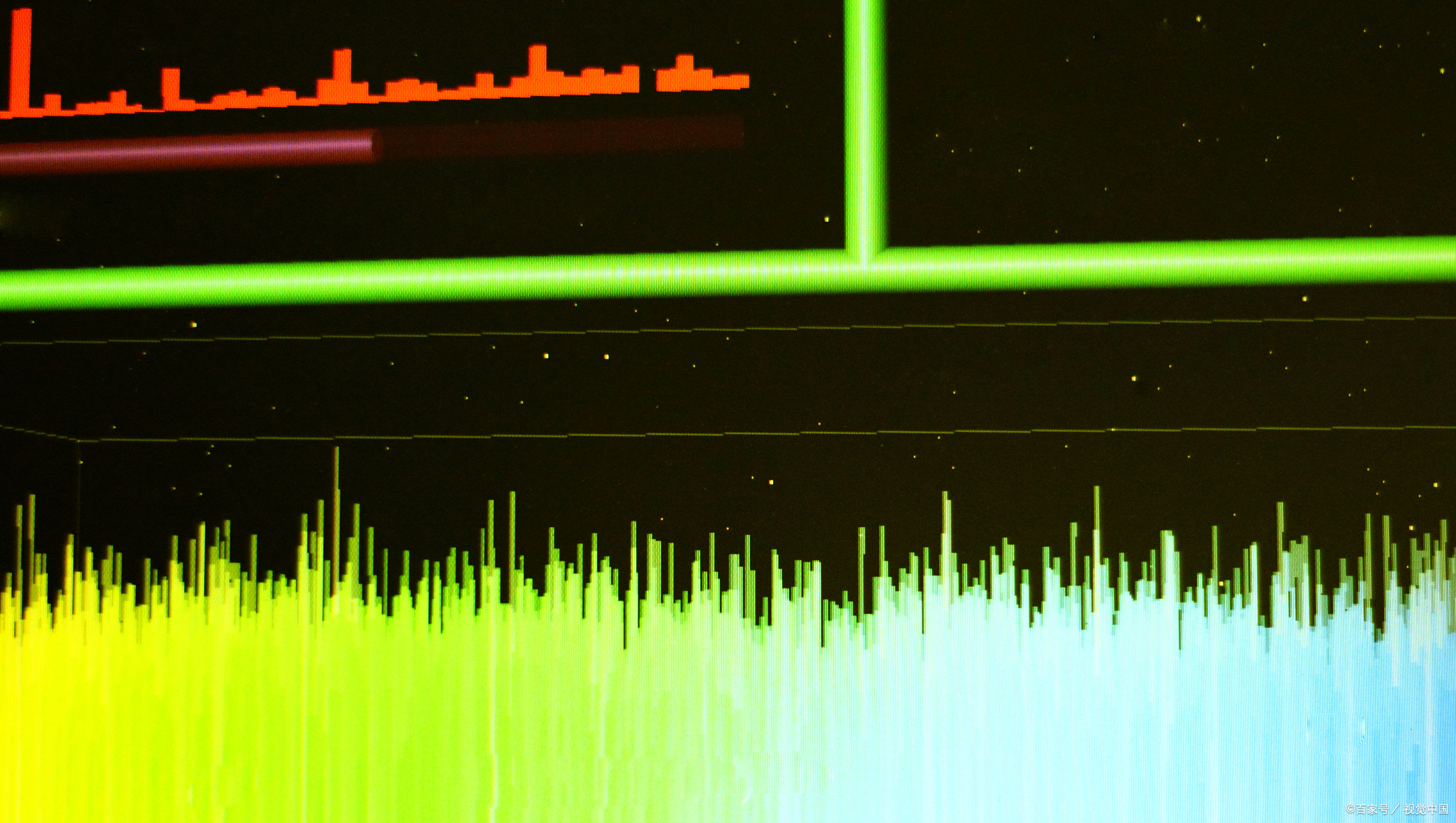
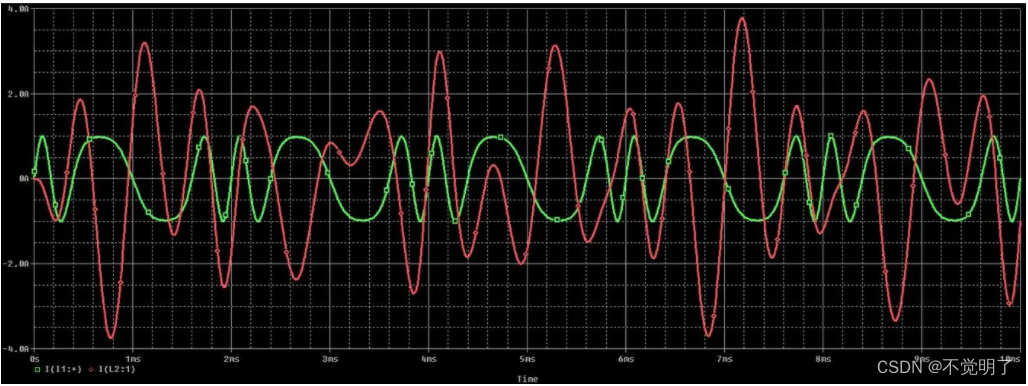
什么是电流电压频谱?
什么是电流电压频谱? 首先,让我们来了解什么是电流电压的频谱。在交流电(AC)系统中,电流和电压是随时间变化而变化的。它们可以表示为时间的函数,即i(t)和u(t)。将这两个时间函数进行傅里叶变换,…
【计算机网络】网络层-控制平面(学习笔记)
一、路由原理
1、网络层功能
1)数据平面
转发:将分组从路由器的一个输入端口移到合适的输出端口
2)控制平面
路由:确定分组从源到目标的路径
2、路由算法
路径长度可靠性延迟带宽负载通信代价
3、路由的原则
1࿰…

二十四节气—雨水,好雨知时节,当春乃发生。
雨水,是二十四节气之第2个节气。
雨水节气不仅表明降雨的开始及雨量增多,而且表示气温的升高,意味着进入气象意义的春天。
雨水节是一个非常富有想象力和人情味的节气,在这一天,不管下不下雨都充满着一种雨意蒙蒙的诗…
二维平面扭曲的python实现及思路
二维平面扭曲的python实现及思路 缘起原理实现代码 缘起
工作需要,需要一个尝试改变设备布点的方法,在csdn闲逛时,偶然间发现这样的一篇文章 二维扭曲,参考这位博主的文章,我对其内容进行复现和进一步挖掘。若有侵权或…

进行模型测量这种量出来坡面的是平面面积还是真实面积?
斜面面积,不是表面积。
DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,也能流畅的加载较大规模实景三维模型,提供方便快捷的数据浏览操作。
#DasViewer##实景三维##三维重建##三维模型…
EM@平面直线方程和直线位置关系判定条件
文章目录 abstract一次函数与直线图形直线方程与方程的直线直线的斜率直线分类倾斜角倾斜角和斜率的关系 直线方程的形式点斜式斜截式两点式 一般式方程任何二元一次表示一条直线一般式 两直线的位置关系用初等代数的知识推导从线性方程组的解的结构推导比值式判定两直线平行重…
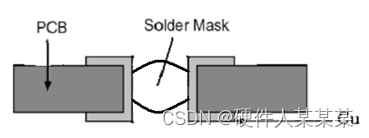
阻焊设计~焊盘阻焊开窗、阻焊桥
阻焊设计
焊盘阻焊开窗
阻焊开窗应比焊盘尺寸大6mils以上(单边3mils),见下图:
阻焊桥
a) 相邻的SMD焊盘,SMD焊盘和插件孔、SMD焊盘和过孔、过孔与过孔之间需要保留阻焊桥;最小阻焊桥宽度2mils &#x…
172版本关闭背钻后自动添加反盘和禁布的功能
172版本关闭背钻后自动添加反盘和禁布的功能 在用Allegro进行PCB设计的时候,有时会需要用到背钻设置,Allegro172版本和166版本背钻设置有些不一样,背钻设置后会自动给背钻孔添加禁布和改变反盘大小,如下图 大部分情况下,我们不需要背钻自动将这些参数进行编辑,Allegro支持…

24节气-清明诗句、海报分享。清明雨上,遥寄相思。
清明节,又称踏青节、行清节、三月节、祭祖节等,节期在仲春与暮春之交。
清明节源自上古时代的祖先信仰与春祭礼俗,兼具自然与人文两大内涵,既是自然节气点,也是传统节日。
中华民族自古就有清明踏青的习俗。踏青古时…
计算机网络 - 网络层的控制平面
Introduction
控制平面设计很多路由的算法, 然后计算出路由表给数据平面转发跟路由的, 传统方式的控制平面是每一个路由器都有一个控制平面, SDN方式的话通常是集中的remote管理, 一个控制平面控制多个本地代理CA - (Control Agent)
路由选择算法
路由route的概念
按照某种…
unity 数学 空间四个点是否在同一个平面
问题:已知三维空间中四点A、B、C、D,如何知道四个点是否在同一个平面呢
首先我们知道三点确定一个平面,所以可以由上面四个点其中任意三点组成一个平面p(A,B,C),另外一个点和三个任意点的形成线࿰…
UG\NX CAM二次开发 设置工序切削区域 UF_CAMGEOM_append_item
文章作者:代工 来源网站:NX CAM二次开发专栏 简介: UG\NX CAM二次开发 设置工序切削区域 UF_CAMGEOM_append_item 效果: 代码:
static int init_proc(UF_UI_selection_p_t select, void* user_data)
{ int errorCode = 0; int num_triples = 1;//UF_UI_mask_…
四、【常用的几种抠图方式三】
文章目录 钢笔工具抠图通道抠图蒙版抠图色彩范围抠图 钢笔工具抠图
钢笔工具抠图适合边缘比较硬的主体对象,因此适合需要精修而且边缘比较生硬的图片,钢笔工具操作比较多,对一般的新手来讲不是很友好,想要使用好钢笔工具需要经常…

5个免费抠图工具,PS直接下岗
无论是设计师,还是摄影师,都需要经常给图片处理背景,用PS效率低,还繁琐。今天给大家推荐5个一键抠图神器,让你节省更多的时间和成本。有需要的朋友赶紧收藏!
1、Removebg
https://www.remove.bg/zh 一个免…
PCL点云处理之沿着法向量投影点云到平面 (一百九十四)
即使你很爱她,也要保留一些尊严 PCL点云处理之沿着法向量投影点云到平面 (一百九十四) 一、算法介绍二、具体实现1.代码(详细注释)2.效果一、算法介绍 实现这样的目标:沿着法向量,将点云投影到一个平面上 具体步骤: 1计算整个点云的法向量,来确定平面方向 2选择某一点…
ransac拟合平面,代替open3d的segment_plane
0.open3d打包太大了,所以决定网上找找代码
使用open3d拟合平面并且求平面的法向量,open3d打包大概1个g的大小。
import open3d as o3dpcd o3d.geometry.PointCloud()pcd.points o3d.utility.Vector3dVector(points)## 使用RANSAC算法拟合平面plane_m…
Cilium 未来数据平面:支撑 100Gbit/s k8s 集群
❝本文转自赵亚楠的博客,原文:http://arthurchiao.art/blog/cilium-tomorrow-networking-data-plane-zh/,版权归原作者所有。欢迎投稿,投稿请添加微信好友:cloud-native-yang译者序本文翻译自 KubeConCloudNativeCon N…

Unity双相机Camera,将虚拟相机视角画面显示在平面Plane上
Unity双相机Camera,将虚拟相机视角画面显示在平面Plane上场景中通过添加Render Texture实现通过挂脚本实现转载链接场景中通过添加Render Texture实现
1、场景中新建Render Texture 2、将其拖到相机的Target Texture上 3、新建Plane,将虚拟相机视角画…
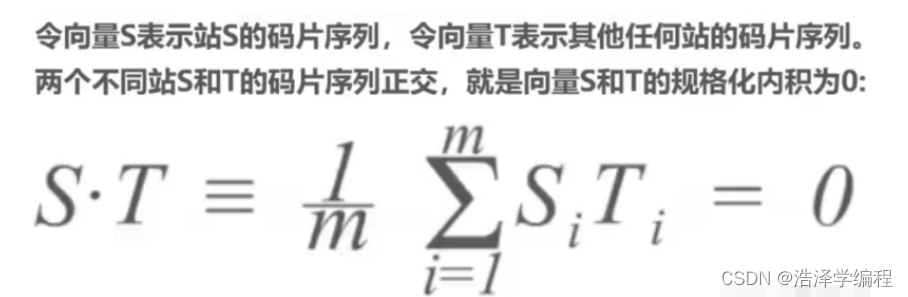
计算机网络:物理层(码分复用计算)
带你快速通关期末 文章目录
一、码分复用二、例题详解 1、例题12、例题23、例题3总结 一、码分复用
码分复用(CDM) 码分多址(CDMA):特点是正交,内积为0 内积公式: 二、例题详解
1、例题1
共…


3D视觉测量:形位公差 平面度测量(附源码)
文章目录 0. 测试效果1. 基本内容2. 实现方法3. 代码实现4. 参考文章目录:形位公差测量关键内容:通过视觉方法实现GD&T中的平面度计算0. 测试效果 1. 基本内容 平面度是一个表达平面平整程度的度量指标,它描述了一个表面与一个理想平面之间的偏差程度。在工程和制造领域…
【二维平面坐标曲线计算,从0到1的范围常用曲线计算公式】
二维平面坐标曲线计算,从0到1的范围常用曲线计算公式 背景y=sin(3.1415*((x)/(2)))提问:推到过程如下:y = sin(X);y = frac (x);y = sin(frac(x));y = sin(frac(x)) * 1.1883965;背景 最近做新内容的时候遇到一个比较有意思的数学题,如何使Y轴随着X轴的增值Y轴从0到1然后又…
提升创意设计水平:十个必备的平面设计素材网站
1. 即时设计
即时设计是一款国产的专业级 UI 设计工具,别看它是一个专业的设计工具,具有齐全的设计工具与上万的优质设计资源,被称为优质的免费素材库毫不夸张。
即时设计 - 可实时协作的专业 UI 设计工具即时设计是一款支持在线协作的专业…
PCL 计算一个平面与一个三角形的交线
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这里实现一个很有趣的功能,就是获取一个平面与一个三角形的交线,具体的思路很简单,就是借助之前的博客中的思路:Matlab 计算一个平面与一条线段的交点,我们只需要遍历三角形中的所有边即可获取我们想要的交线,…
过孔焊盘~尺寸、间隙、通流能力
过孔焊盘
导通孔(via)焊盘尺寸
a) 外层焊盘环宽(A)要大于5mil,内层焊盘环宽(A)要大于8mil, 推荐导通孔孔径及焊盘尺寸如下: b) 推荐反焊盘大小尺寸≥过孔焊盘+20MIL。 走线与金属化孔间的最小间隙
推荐的走线距金属…
Open3D 点云最小二乘法拟合平面(剔除噪声,Python版本)
除了诱惑之外,我可以抵抗任何事物。 ----王尔德 文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 这个算法的思路很简单,就是通过剔除一些异常点来拟合更为合适的平面,具体过程如下所示: 1、首先使用最小二乘法拟合一个平面系数的初值。 2、计算所有有效点到拟合…

国内知名插画培训机构有哪些
国内知名插画培训机构有哪些?给大家梳理了国内5家专业的插画师培训班,最新无大插画班排行榜,各有优势和特色! 一:国内知名插画培训机构排名 1、轻微课(五颗星) 主打课程有日系插画、游戏原画、古…
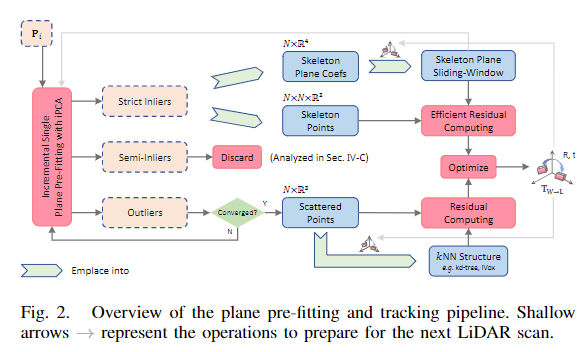
经典文献阅读之--LIO-PPF(增量平面预拟合LIO)
0. 简介
自从ikd-tree出来后,现在越来越多的工作瞄准了增量式这种方法,比如说激光惯导里程计(LIDAR-Inertial Odometry,LIO)的高精度跟踪通常涉及最小化点到平面距离的k最近邻(kNN)搜索&#x…
计算机网络 - 网络层的数据平面
Overview
首先Network Layer负责的是host to host的传输, 然后可以分为两个平面, 控制平面以及数据平面.
数据平面: 负责forward datagrams from input to output links
决定路由器从input到output
转发功能:
基于目标地址 转发表
SDN方式基于多个字段流表
控制平面: 调…
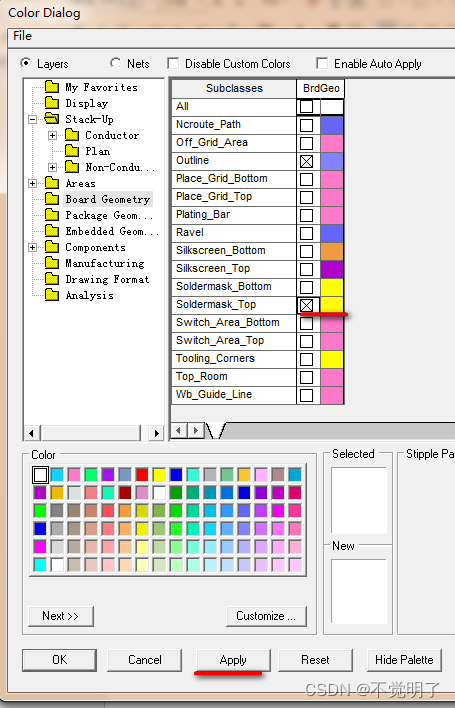
Allegro166版本如何在颜色管理器中实时显示层面操作指导
Allegro166版本如何在颜色管理器中实时显示层面操作指导 在用Allegro166进行PCB设计的时候,需要在颜色管理器中频繁的开关层面。但是166不像172一样在颜色管理器中可以实时的开关层面,如下图
需要打开Board Geometry/Soldermask_top层,首先需要勾选这个层面,再点击Apply即…

Midjourney教程(二)——Prompt基本结构
Midjourney教程——Prompt基本结构
Basic Prompt
基础版本的prompt仅仅包含图片的描述,能够满足普通的需求,如下图所示 Advanced Prompt
高级版本的prompt主要包含三个部分,如下图所示 Image Prompts(可选)
prompt第一部分是Image&#x…
Revit 平面的圆弧,空间的椭圆弧
大家对Revit的空间曲线那么理解,如何用代码创建空间的椭圆弧,,上看是圆弧,正面看是椭圆? 直接放代码: Document doc = commandData.Application.ActiveUIDocument.Document; Autodesk.Revit.DB.XYZ center = new Autodesk.Revit.DB.XYZ(0, 0, 0); …
PCB封装设计指导(二)如何阅读Datasheet,找出对应的封装尺寸和信息
PCB封装设计指导(二)如何阅读Datasheet,找出对应的封装尺寸和信息 所有的封装的建立都是根据Datasheet来建立的,脱离了Datasheet的封装是没有可靠性和保障的。
所以如何看懂Datasheet,从中获取需要的封装信息是非常重要的,下面介绍如何阅读Datasheet,然后从中找到对应的…
QDDR究竟是什么?
QDDR究竟是什么? 在当今的高科技时代,我们经常遇到各种各样的缩写和术语,其中QDDR就是其中一个。那么,究竟什么是QDDR呢? QDDR,全称Quad Data Rate,是一种同步动态随机存储器(SDRAM)…

3D点云处理:拟合平面_最小二乘法_1⭐
文章目录 拟合效果1. 最小二乘法拟合平面1.1 直接求解法1.2 拉格朗日乘子法1.3 SVD分解法2. 随机采样拟合平面2.1 随机采样基本内容2.2. pcl实现参考相关内容: 3D点云处理:拟合平面_优化后的最小二乘法_2 拟合效果 左侧为拉格朗日结果,右侧图为SVD求解结果,红色为拟合的平面…

设计师一定要知道这5个免费样机素材网
本期推荐5个设计师必备的样机素材网站,免费下载,建议收藏~
1、菜鸟图库
https://www.sucai999.com/searchlist/3217----all-0-1.html?vNTYxMjky 网站有多种类型的设计素材,像平面、电商、UI、办公等素材这里面都能找到。样机素材分类清晰&…
设计师首选:最佳的5款网页设计软件
对于UI设计师来说,网页设计是一项必要的技能。如何做好网页设计?除了设计理念,网页设计和制作软件的应用也是不可或缺的。目前市场上有很多这样的软件,工人要想做好,就必须先磨利工具。如果他们想做网页设计࿰…
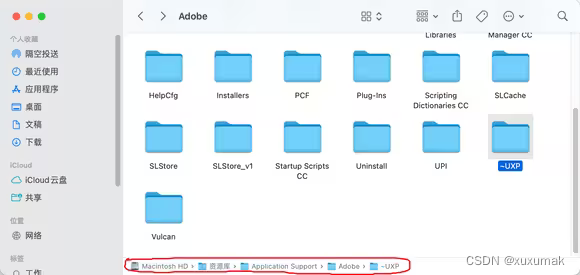
Mac PS2023/2024储存窗口黑屏不显示 解决方法
mac 版本ps2023,存储为窗口突然显示为空白了,没有任何文字按钮,尝试过重启软件、重启电脑、重新安装、电脑系统更新,皆没有效果。
仅ps2023有这个bug,其他操作正常。 具体步骤: 1.打开finder, 先点击左边文稿, 再点击…
open3d 拉格朗算子法拟合平面方程
oepn3d 拉格朗算子法拟合平面方程 一、算法原理1.算法步骤 二、代码三、结果1.原点云数据2.将点云拉格朗日乘子法拟合平面投影在该平面 四、相关数据 一、算法原理
1.算法步骤
对k一近邻点拟合平面,最小二乘法(平面过重心),拟定…
二十三、【五种图层】
文章目录 像素图层智能图层文字图层形状图层调整图层 像素图层
像素图层由空白像素图层组成,上边没有任何颜色,如下图,我们可以使用画笔工具在空白相处图层上进行修改:
智能图层
智能图层可以记录该图层当前的数据在被编辑后可…
传输线的阻抗和反射到底是什么关系?
传输线的阻抗和反射到底是什么关系? 传输线是通信系统中最基本的传输元件之一,它可以将信号从一个端点传输到另一个端点。然而,在实际的通信系统中,传输线往往面临着许多问题,其中最主要的两个问题是阻抗不匹配和信号反射。本文将…
平面设计师要会3D吗 优漫动游
所谓物以稀为贵,对于设计人才也一样。越是稀缺的能力,能够发挥的价值就越高。于是现在很多互联网名企在招聘的时候都加了一条:会3D设计者优先。 其实这些看起来很厉害的设计,归结起来无非就三种形式:插画、三维、合成…
专题:曲面的切平面、法线
假设曲面方程为隐函数 F ( x , y , z ) 0 ,点 M ( x 0 , y 0 , z 0 ) 是其上一点 又在点 M 处任意引一条在曲面上的曲线,设该曲线参数方程为: { x φ ( t ) y ψ ( t ) z ω ( t ) ,且当 t t 0 时, x x 0 , y y…
第四章、网络层:数据平面
文章目录 4.1 网络层概述4.1.1 转发和路由选择:数据平面和控制平面4.1.2 网络服务模型 4.2 路由器工作原理4.2.1 输入端口处理和基于目的地转发4.2.2 交换4.2.3 输出端口处理4.2.4 如何出现排队4.2.5 分组调度 4.3 网际协议:IPv4、寻址、IPv6及其他4.3.1…

原画培训机构排名前十名,最新10大原画培训机构
原画培训机构排名出来啦,最新10大原画培训机构出炉,快来看看游戏原画培训机构有哪些吧,对于不知道如何选择靠谱的原画培训班,可以借鉴和参考一下!
1、轻微课
国内人气很高的板绘学习平台,主打课程有日系插…

P1429 平面最近点对(加强版)【芙芙】
平面最近点对(加强版)
题目背景
P7883 平面最近点对(加强加强版)
题目描述
给定平面上 n n n 个点,找出其中的一对点的距离,使得在这 n n n 个点的所有点对中,该距离为所有点对中最小的
…
点云数据做简单的平面的分割 三维场景中有平面,杯子,和其他物体 实现欧式聚类提取 对三维点云组成的场景进行分割
点云分割是根据空间,几何和纹理等特征对点云进行划分,使得同一划分内的点云拥有相似的特征,点云的有效分割往往是许多应用的前提,例如逆向工作,CAD领域对零件的不同扫描表面进行分割,然后才能更好的进行空洞修复曲面重建,特征描述和提取,进而进行基于3D内容的检索,组合…
python之计算平面点集的的面积
在当今数据驱动的世界中,计算平面点集的最小外接轮廓面积被广泛应用于各种实际场景中。它是一项重要而魅力十足的任务,旨在找到一个最小的矩形或多边形区域,能够完全包围给定的离散点集。这个看似简单的问题背后隐藏着许多挑战,需…
unity 数学 如何计算线和平面的交点
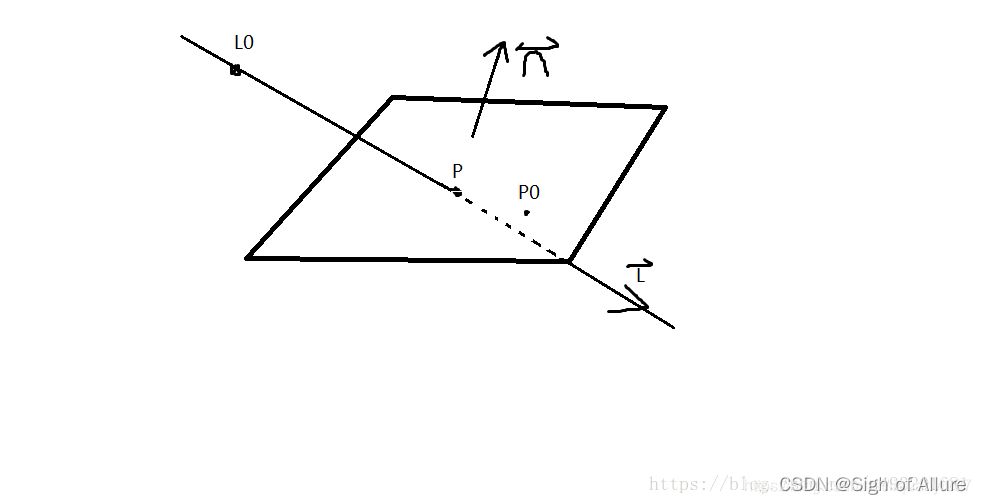
已知一个平面上的一点P0和法向量n,一条直线上的点L0和方向L,求该直线与该平面的交点P
如下图 首先我们要知道向量归一化点乘之后得到就是两个向量的夹角的余弦值,如果两个向量相互垂直则值是0,小于0则两个向量的夹角大于90度,大于…
PCL 空间两平面交线计算
PCL 空间两平面交线计算
std::vector<float> LineInPlanes(std::vector<double> para1, std::vector<double> para2)
{std::vector<float
已知平面内三点,求其平面的法向量
三点平面法向量 设三点坐标为A(x1,y1,z1),B(x2,y2,z2),C(x3,y3,z3) 向量AB(x2-x1,y2-y1,z2-z1),AC(x3-x1,y3-y1,z3-z1) AB、AC所在平面的法向量即ABAC(a,b,c),其中: a(y2-y1)(z3-z1)-(z2-z1)(y3-y1) b(z2-z1)(x3-x1)-(z3-z1)(x2-x1) c(x2-x1)(y3-y1)-(x3-x1)(y2-y1)…
三维空间离散点如何拟合平面?
文章目录 0.引言1.算法原理2.算法实现 0.引言 在点云建模过程中,有时需要对扫描建模的点云进行标定,在实际使用中往往以地面做为参照平面,需要将扫描的三维空间点云进行拟合平面,以便纠正扫描结果。本文对三维空间离散点拟合平面算…

Sketch是什么?全面解读这款设计师的利器
Sketch是一款什么样的软件?
Sketch是什么样的软件?Sketch是一种广泛使用的设计软件,特别适用于界面设计和矢量图形编辑。它是一种专业的绘图工具,由Netherlands型号和2010年推出的Apple公司开发。
Sketch具有简单、高效、功能丰…
《程序设计基础》 第九章 结构 7-6 平面向量加法 (15 分)
本题要求编写程序,计算两个二维平面向量的和向量。
输入格式:
输入在一行中按照“x1 y1 x2 y2”的格式给出两个二维平面向量v1(x1,y1)和v2(x2,y2)的分量。
输出格式:
在一行中按照(x, y)的格式输出和向量,坐标输出小数点后一位&…
C++ Qt/Eigen拟合三维平面与三维圆
std::optional<std::tuple<double, double, double, double>> FitPlane(const QList<QVector3D>& points)
{// 如果点数小于3,无法拟合平面if (points.size() < 3) {return std::nullopt;}double x0x0 0, x0y1 0, x0z2 0, x0_3 0;doub…
PCL点云处理之点云置平(拟合平面绕中心旋转到绝对水平)(二百二十七)
PCL点云处理之点云置平(绕中心旋转到绝对水平)(二百二十七) 一、什么是点云置平二、算法流程三、算法实现一、什么是点云置平
有时候,我们处理的点云平面并非位于水平面,而是位于某个任一三维平面上,而大多数算法又只能在水平面处理,或者水平面的点云处理是相对更简单…
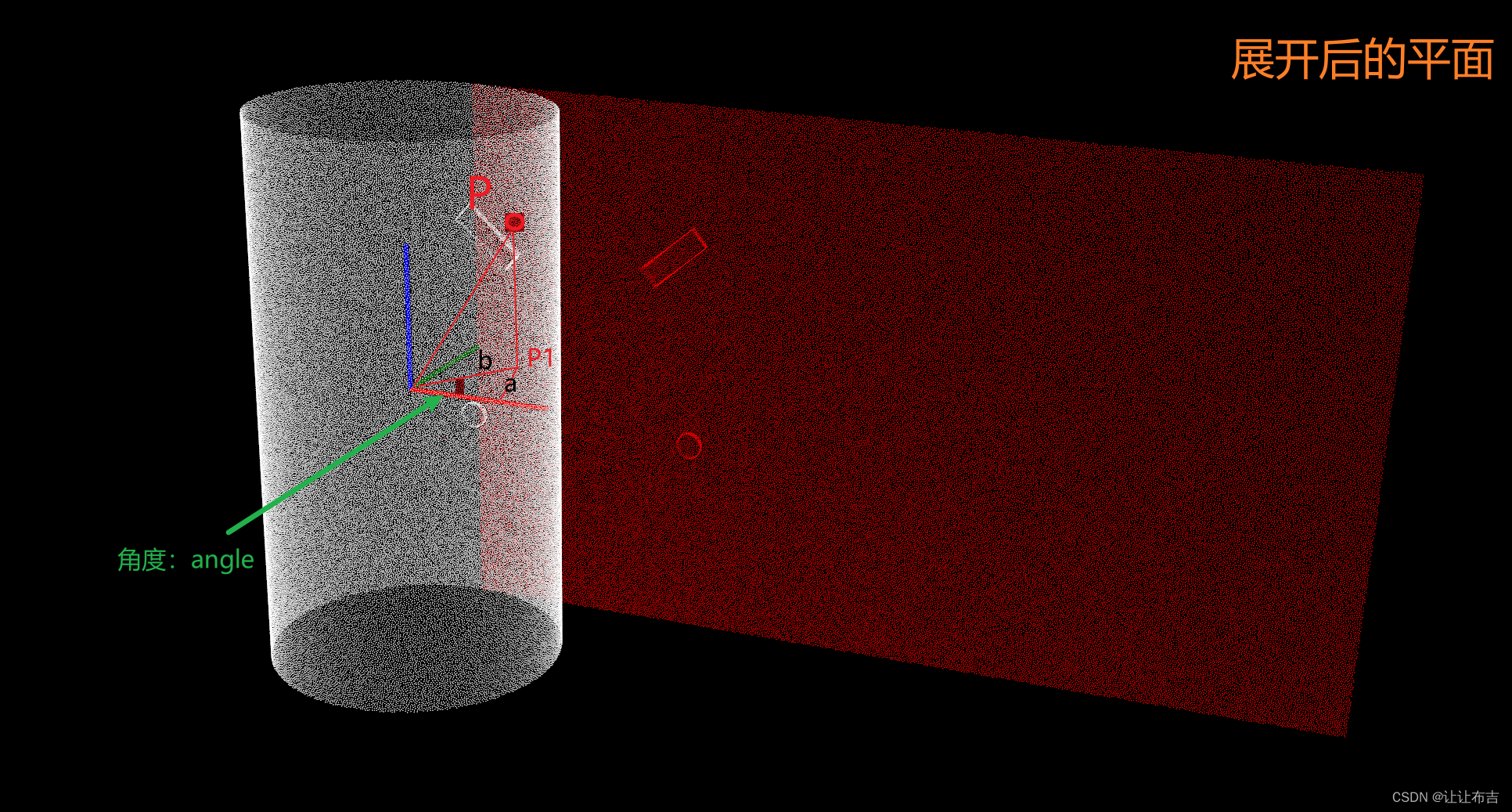
3D点云处理:圆柱侧面点云展开为平面 凹凸缺陷检测(附源码)
文章目录 1. 基本内容展开部分推导2. 展开流程3. 代码实现4. 应用文章目录:3D视觉个人学习目录微信:dhlddxB站: Non-Stop_目标:对采集的圆柱面点云展开为平面;应用:可用于检测圆柱侧面的凹凸缺陷;1. 基本内容 圆柱的侧面展开原理是将一个圆柱体(或柱体)的侧面展开成一个…
MATLAB 自定义生成平面点云(可指定方向,添加噪声)(48)
MATLAB 自定义生成平面点云(可指定方向,添加噪声)(48) 一、算法介绍二、算法步骤三、算法实现1.代码2.效果一、算法介绍
通过这里的平面生成方法,可以生成模拟平面的点云数据,并可以人为设置平面方向,平面大小,并添加噪声来探索不同类型的平面数据。这种方法可以用于…
![[word] word大小写快捷键是什么? #知识分享#学习方法#笔记](https://img-blog.csdnimg.cn/img_convert/aebb5cbcc027319d208baff296fdc85b.jpeg)
[word] word大小写快捷键是什么? #知识分享#学习方法#笔记
word大小写快捷键是什么?
word转换大小写的快捷方式是按“ShiftF3”。设置方法如下:
1、在电脑桌面找到需要转换大小写的文档,右键单击打开它。
2、打开文档之后,在文档里面选中需要转换的段落。 3、选中了之后在键盘里面找到“…
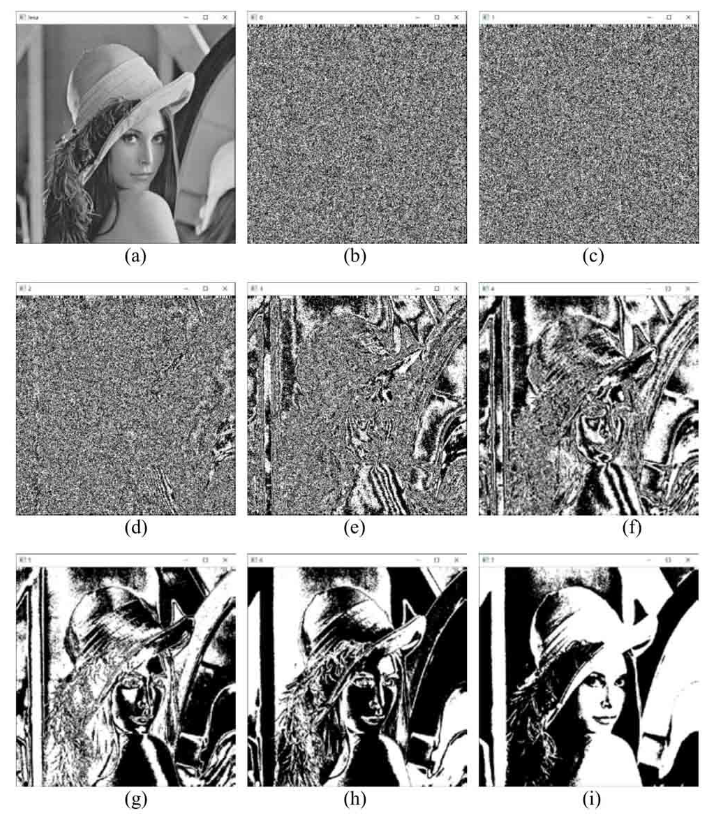
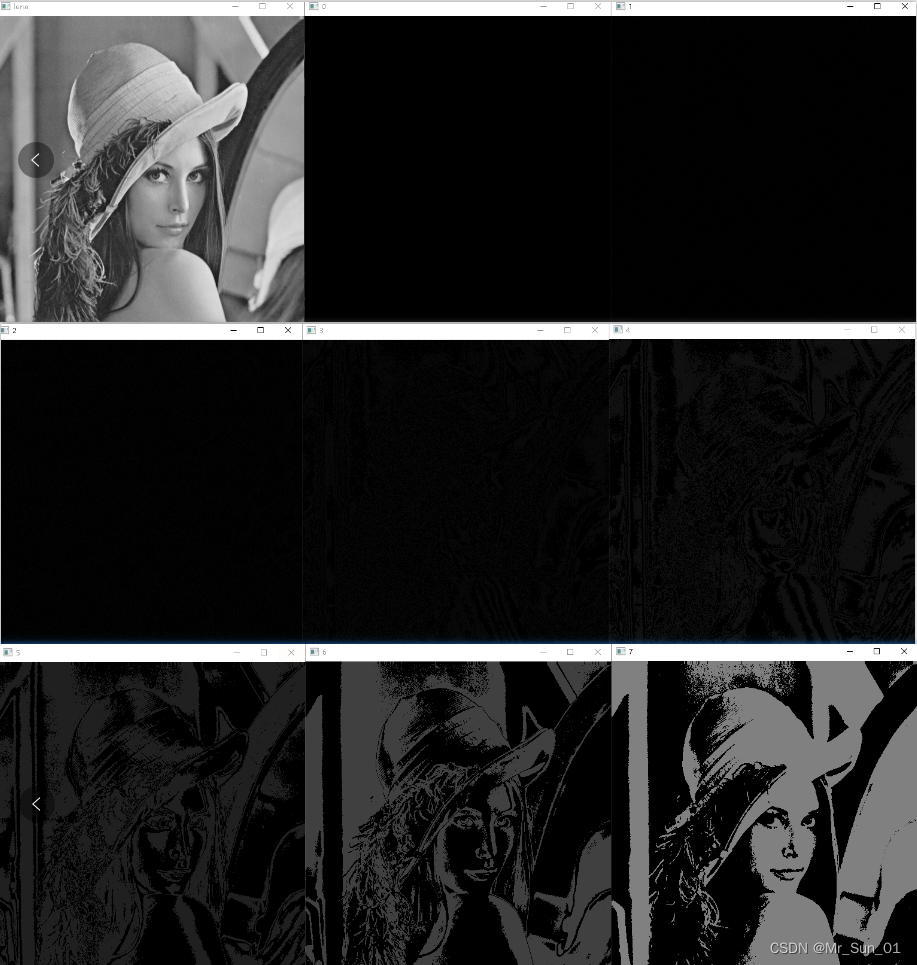
04 OpenCV位平面分解
1 基本概念
位平面分解的核心思想是将图像的每一个像素分解为多个二进制位,分别存储在不同的位平面上。例如,如果一个图像是8位深度的,则可以分解为8个位平面,每个位平面上存储一个二进制位。
位平面分解在图像压缩中有着重要的…
平面设计师提问常用的ChatGPT通用提示词模板
请解释一下XX设计理念或原则的基本含义和应用方法。 如何运用XX设计软件或工具来提高工作效率? XX设计风格有哪些特点和创新之处? 如何为XX产品或品牌设计一个具有吸引力的视觉形象? XX设计的色彩搭配和排版有哪些技巧和注意事项…

【Web前端开发基础】CSS3之Web字体、字体图标、平面转换、渐变
CSS3之Web字体、字体图标、平面转换、渐变 目录 CSS3之Web字体、字体图标、平面转换、渐变一、Web字体1.1 Web字体概述1.2 字体文件1.3 font-face 规则 二、字体图标2.1 字体图标2.2 字体图标的优点2.3 图标库2.4 下载字体包2.5 字体图标的使用步骤2.6 字体图标使用注意点2.7 上…
八、【快速选择工具组】
文章目录 对象选择工具快速选择工具魔棒工具 对象选择工具
当我们选择对象选择工具时,需要先注意上边有一个循环的圆,它会进行内容识别,当识别完成会停止旋转。这个时候我们按住n键,或者将鼠标放上对应的图形时会出现选中的颜色。…

Allegro如何知道单个操作命令的拼写
Allegro如何知道单个操作命令的拼写 在用Allegro做PCB设计的时候,时常需要给某些命令设置一些快捷键,但是有时候无法知道命令的拼写是什么,就无法定义到env文件里面去
如下图 如何知道上方图标的命令拼写,下面介绍两种方法
方法一 鼠标左键移动到图标的位置,就会出现命令…

激光SLAM(二):点云拟合和平面参数化
点云拟合和平面参数 一、平面拟合:特征值法和SVD法二、平面参数化1)Hesse形式2)球坐标3)最近点4) 单位四元数 三、直线拟合 一、平面拟合:特征值法和SVD法
平面方程如下,n是法向量,d是截距 当…
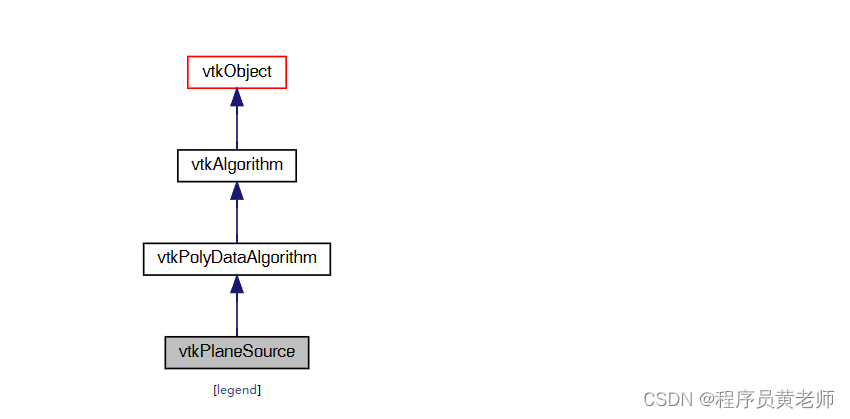
六、VTK创建平面vtkPlaneSource
vtkPlaneSource创建位于平面中的四边形数组 先看看效果图: vtkPlaneSource 创建一个 m x n 个四边形数组,这些四边形在平面中排列为规则平铺。通过指定一个原点来定义平面,然后指定另外两个点,这两个点与原点一起定义平面的两个轴。这些轴不必是正交的 - 因此您可以创建平行…

Allegro172版本如何在联机模式下使用skill文件操作指导
Allegro172版本如何在Symphony模式下使用skill文件操作指导 在用Allegeo172版本进行PCB设计的时候,有时会用到Symphony模式进行多人实时在线协同设计,如下图 这个模式设计起来可以提升设计速度,但是也有一个缺陷,就是不能使用skill文件
如下图,当调用skill的时候就会出现…
2D平面机器人运动ESKF过程相关方程推导
2D平面运动相关状态量及符号约定
机器人(Robot)状态:世界系下位置(Positon)记为 P R ∣ x R y R ∣ P_R\begin{vmatrix} x_R \\ y_R \end{vmatrix} PR xRyR ,世界系下航向(orientation)记为 Φ \Phi Φ; 路标点(Landmark)状态:…
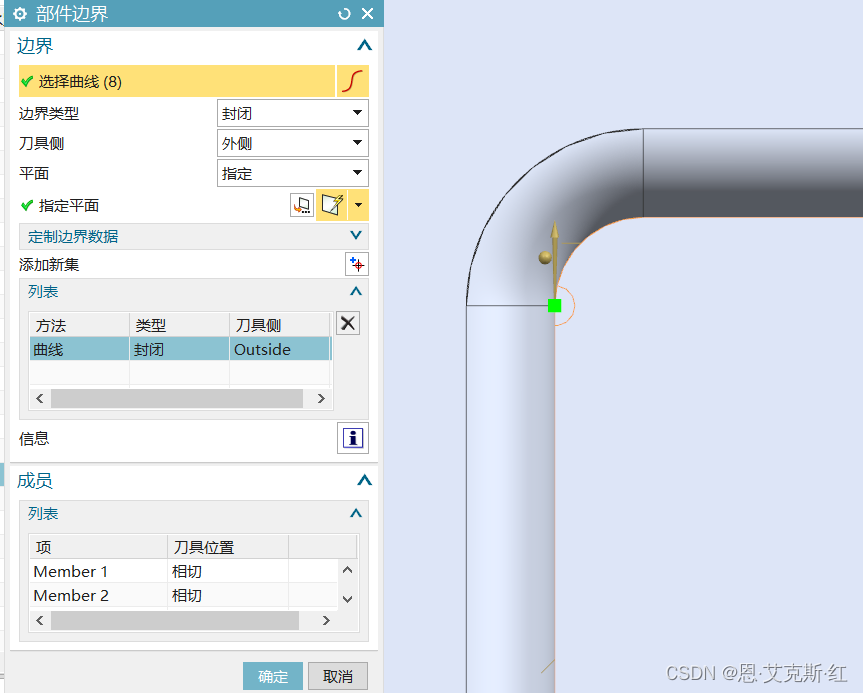
NX/UG二次开发—CAM—平面铣边界准确设置方法
大家在对平面铣设置边界时,经常遇到边界方向与自己期望的不一致,有些人喜欢用检查刀路是否过切来判断,但是对于倒角、负余量等一些情况,刀路本来就是过切的。对于多边界,可以根据选择的曲线来起点和面的方向来确定&…
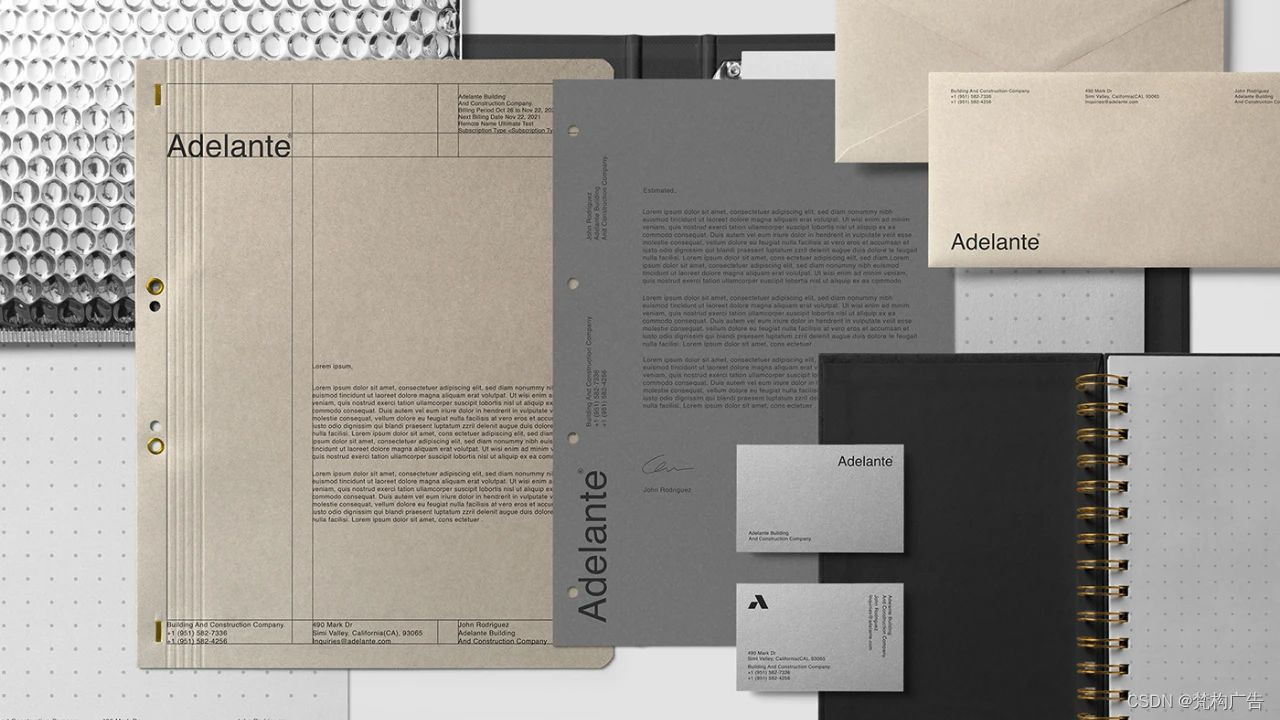
企业vi设计一般包括哪些内容,企业vi设计思路-梵构广告
企业VI设计是企业视觉识别系统的简称,是指通过一系列设计元素和规则来呈现企业的形象和特色,以提升品牌认知度和形象的统一性。 企业VI设计包括以下几个重要组成部分: 1. 标志Logo设计: 标志是企业VI设计的核心元素,它…
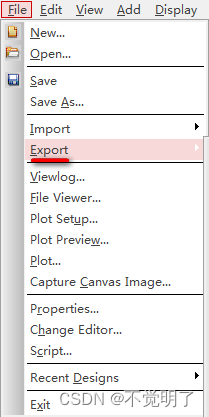
Allegro如何输出第三方网表操作指导
Allegro如何输出第三方网表操作指导 在做PCB设计的时候,会需要输第三方网表,Allegro支持快速输出第三方网表,如下图 具体操作如下 选择File选择Export
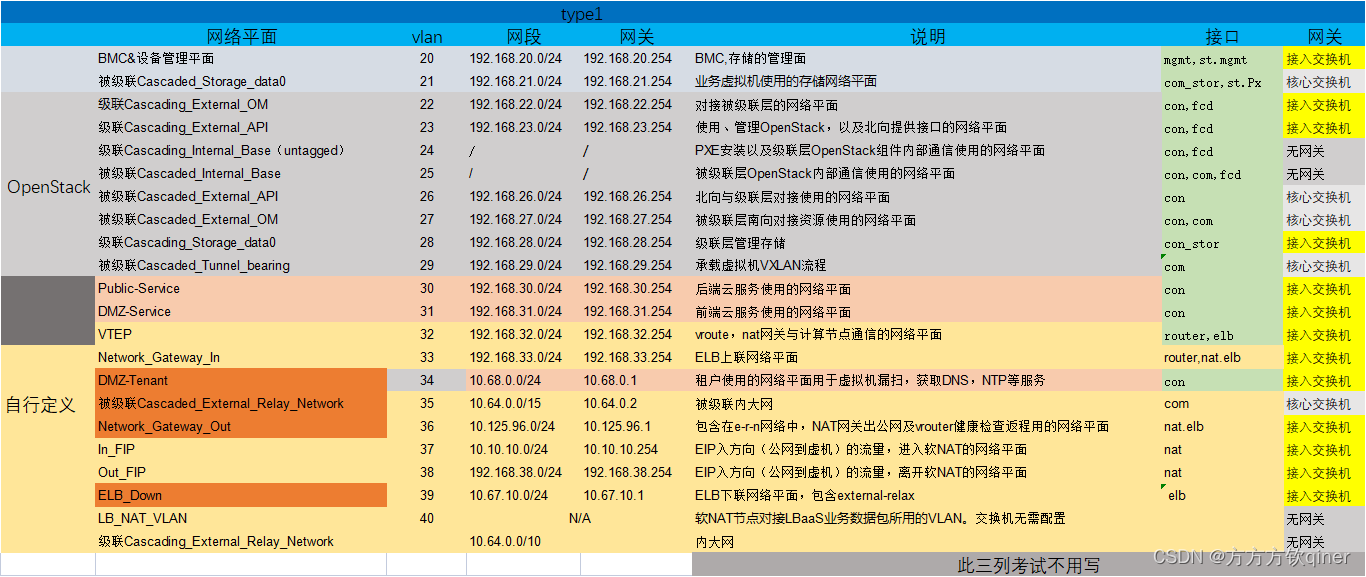
HCIE-Cloud Computing LAB备考第二步:逐题攻破--第五题:规划--根据网络平面规划表,完成ensp中接入交换机SW1/2的配置
解题:根据网络平面规划表,完成ensp中接入交换机SW1/2的配置 服务器接口表: 设备名称管理口业务口业务口备注RH1RH1_BMCRH1_eth0- RH1_eth3eth0,1,2,3控制节点RH2RH2_BMCRH2_eth0- RH1_eth3控制节点RH3RH3_BMCRH3_eth0- RH1_eth3控制节点RH4RH4_BMCRH4_eth0- RH1_eth3KVM节点…
Solidworks:平面工程图练习
把草图变成工程图,遇到第一个问题是线宽需要用鼠标选中后再设置线宽和颜色。我觉得应该有一个自动设置现款的功能,不知道有没有,我找了半天也没找到。 另一个问题是,作业代号字体上下颠倒了,不知道这是啥意思。 第三个…
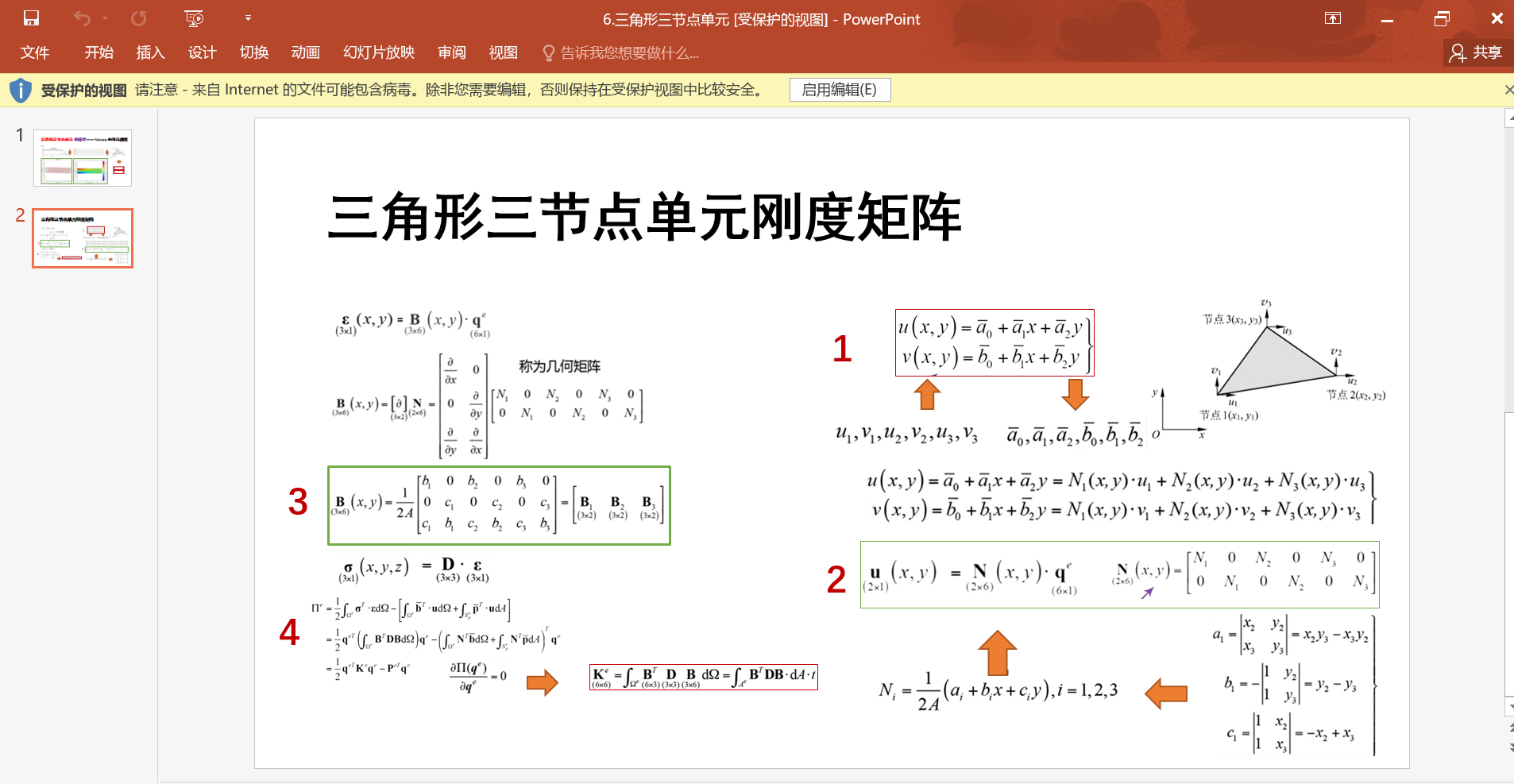
三角形单元悬臂梁Matlab有限元编程 【程序源码+PPT讲义】|平面单元 | 三节点
专栏导读 作者简介:工学博士,高级工程师,专注于工业软件算法研究本文已收录于专栏:《有限元编程从入门到精通》本专栏旨在提供 1.以案例的形式讲解各类有限元问题的程序实现,并提供所有案例完整源码;2.单元…

Halcon3D表面平面度检测-平面差值法
//倾斜平面矫正
https://blog.csdn.net/m0_51559565/article/details/137146179前言
通常我们对表面平面度进行检测时,通常使用2种方式。1:通过大卷积核的高斯滤波进行拟合平面,然后求取拟合平面与3D模型间的点间的距离。2:通过平…
Vtk裁剪功能之平面裁剪vtkClipClosedSurface(vtk小记)
1.原理分析
对你的三维图形,使用一个平面切下去,然后保留一半。
确定一个平面:使用法向量和一个三维坐标点可以确定一个平面
原始图像 切一刀 切两刀,又一半 切三刀,又一半 源代码
#include <vtkActor.h>
#i…

《计算机网络--自顶向下方法》第四章--网络层:数据平面
4.1网络层概述
每台路由器的数据平面的主要作用是从其输入链路向其输出链路转发数据报;控制平面的主要作用是协调这些本地路由器转发动作,使得数据报沿着源和目的地主机之间的路由器路径进行端到端传送
路由器具有截断的协议栈,即没有网络层…
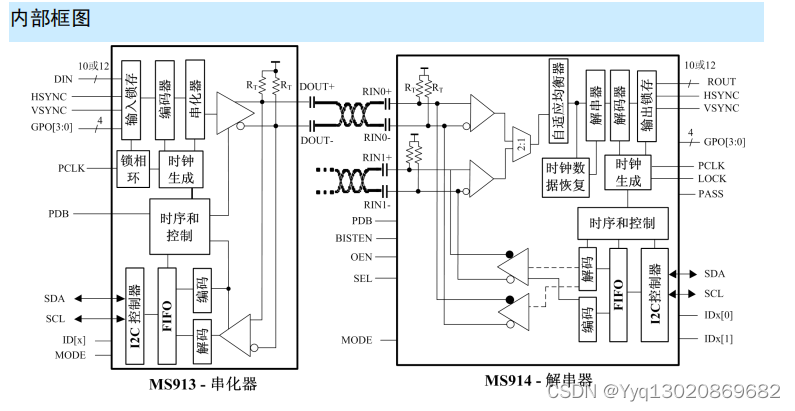
MS913/914 25-100MHz 10/12 位用于平面显示器链路Ⅲ的具有直流平衡编码和双向控制通道的串化器和解串器
MS913/MS914 芯片组是 25MHz~100MHz 10 位/12 位 FPD Link III SER/DES(串化器/解串器),它提供高速 FPD-Link III 接口和高速正向通路以及用于差分对上数据发送的双向 控制通路。广泛应用于车载摄像,医疗设备,管道探测等领 域。 主要特点…

Web前端—移动Web第一天(平面转换、渐变、综合案例--播客网页设计)
版本说明
当前版本号[20231117]。
版本修改说明20231117初版
目录 文章目录 版本说明目录移动 Web 第一天01-平面转换简介示例 平移定位居中案例-双开门旋转转换原点案例-时钟多重转换缩放案例-播放特效倾斜 02-渐变线性渐变案例-产品展示径向渐变 03-综合案例导航-频道箭头…

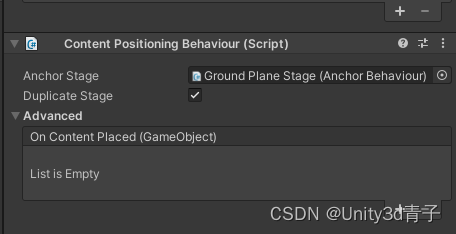
【Vuforia+Unity】AR04-地面、桌面平面识别功能(Ground Plane Target)
不论你是否曾有过相关经验,只要跟随本文的步骤,你就可以成功地创建你自己的AR应用。
官方教程Ground Plane in Unity | Vuforia Library 这个功能很棒,但是要求也很不友好,只能支持部分移动设备,具体清单如下:
01.Vuforia的地面识别功能仅支持的设备清单: Recommended…
8个卓越的矢量图插画资源网站
在插画设计中,如何寻找能够自由缩放的矢量图插画素材,一直是我们设计的难点。
下面,为大家推荐8个矢量图插画素材网站,希望能够满足同学们的设计需求。
1:即时设计
即时设计是可云端编辑的专业级 UI 设计工具&#…

24节气-芒种 || 一分耕耘,一分收获。
“时雨及芒种,四野皆插秧。”
芒种,农历二十四节气中的第 9 个节气,夏季的第 3 个节气,表示仲夏时节的正式开始。
芒种意味着谷物播种的好时机,农事耕种的劳动量会大大增加,因此芒种也有“忙种”的说法。…
Open CASCADE学习|曲面上一点的曲率及切平面
曲率(Curvature)是一个几何学的概念,用于描述一个物体的形状在某一点上的弯曲程度。在我们日常生活中,曲率与我们的生活息息相关,如道路的弯道、建筑物的拱形结构、自然界的山脉等等。了解曲率的概念和计算方法&#x…
2050.折线分割平面
思路见: Hdoj 2050.折线分割平面 题解-CSDN博客 import java.util.*;public class Main {public static void main(String[] args) {Scanner scannernew Scanner(System.in);int num scanner.nextInt();for (int i0;i<num;i){int n scanner.nextInt();System.ou…
判断平面中两射线是否相交的高效方法
1. 简介
最近在工作中遇到判断平面内两射线是否相交的问题。
对于这个问题的解决,常规的方法是将两条射线拓展为直线,计算直线的交点,而后判断交点是否在射线上。
这种方法,在思路上较为直观,也易于理解。然后,该方法在计算量上相对较大。对于少量射线间的交点计算尚可…
基于同名面片的TLS测站点云配准
1、原理介绍 2、代码介绍 基于C++编写的程序代码如下,其依赖eigen矩阵运算库,在创建工程时包含库目录中使用了相对路径,因此其下载下来直接可以运行,不用单独在设置环境,非常方便。
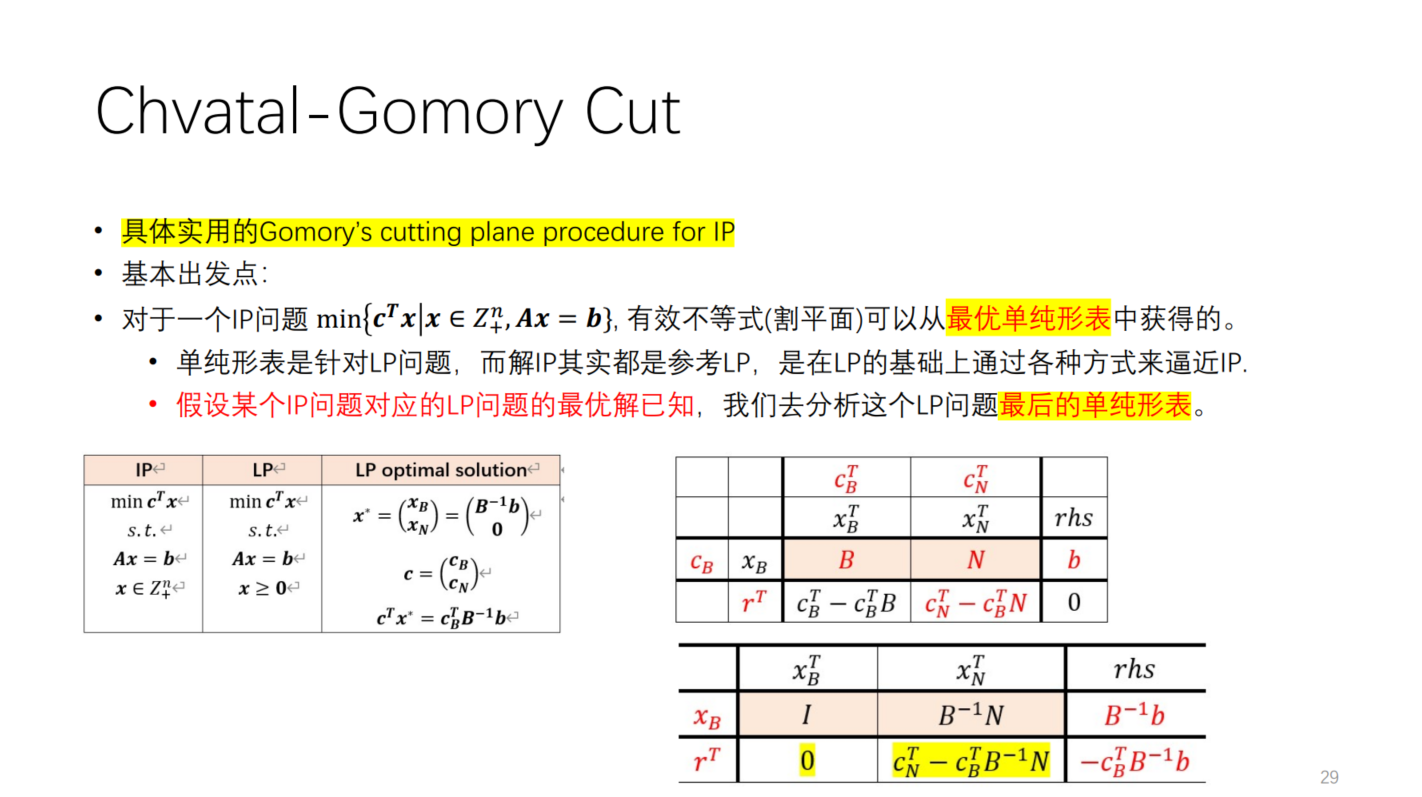
第七课-----分支切平面
割平面方法的基本思想是对于一个优化问题而言,通过不断添加约束条件来切割可行域, 最终将可行域不断变小,相当于搜索空间变小。在LP中讲过,一个等式约束就等价于一个超平面,一个不等式约束就代表一个半空间,…
CSS2DObject 形成3D模型二维屏幕平面label
CSS2DObject 形成二维平面label *
<!DOCTYPE html>
<html><head><meta charset"utf-8"><meta name"viewport" content"widthdevice-width, user-scalableno, minimum-scale1.0, maximum-scale1.0"><title>…

Python+OpenCV 实现图像位平面分层进行图像信息隐藏
引言 闲言:这篇博客回归了传统图像处理领域,主要是在研究生的数字图像处理课程上接触到了新的知识–图像位平面,觉得还挺有意思的,可以用来做信息隐藏,索性记录一下。因为拖延的缘故,到学期末才赶出来一篇&…
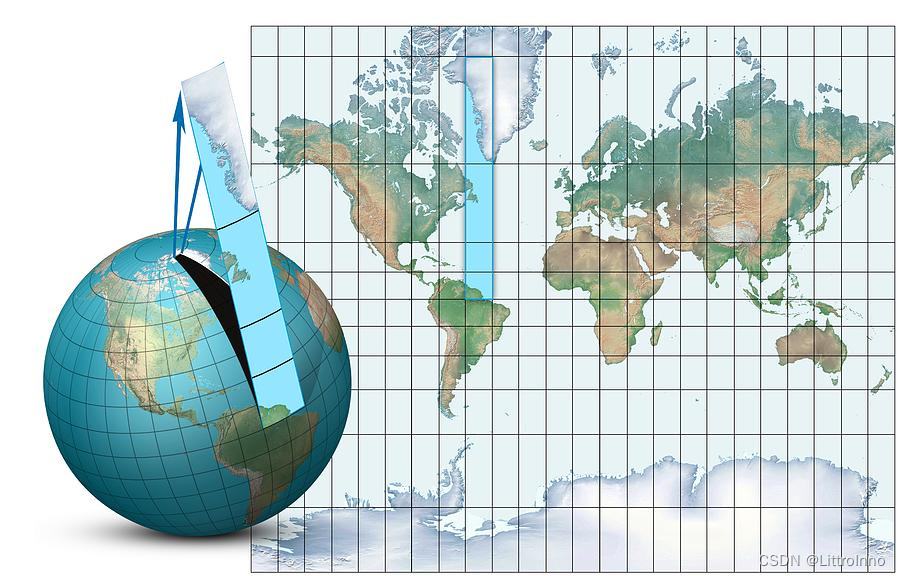
世界坐标系转换为平面地图坐标
将世界坐标系转换为平面地图坐标的方法通常涉及地图投影。地图投影是一种将地球(一个三维球体)上的点转换为平面(二维)地图上的点的方法。 这里介绍几种常见的地图投影方法: 墨卡托投影(Mercator Projection): 这是最常见的投影方式之一,尤其用于航海地图。它将经纬度…

VR数字展厅,平面静态跨越到3D立体化时代
近些年,VR的概念被越来越多的人提起,较为常见的形式就是VR数字展厅。VR数字展厅的出现,让各地以及各行业的展厅展馆的呈现和宣传都发生了很大的改变和革新,同时也意味着展览传播的方式不再局限于原来的图文、视频,而是…

大广赛获奖作品分享:平面设计精选!
全国大学生广告艺术大赛:简称大广赛,是中国最大的高校广告艺术传播平台,是由教育部高等教育司指导、中国高等教育学会广告教育专业委员会主办的全国性高校文科大赛。大广赛旨在提高大学生的创新精神和实践能力,激发大学生的创意灵…
PCL 计算一个平面与包围盒体素的相交线
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 基于之前计算的包围盒体素(PCL 包围盒体素化显示),这里使用一个平面与其进行相交,并求出与其中体素单元的相交线。 二、实现代码
//标准文件
#include <iostream>
#include <thread>//PCL
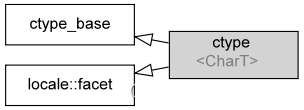
c++11 标准模板(STL)本地化库 - 平面类别 - (std::ctype) 定义字符分类表(六)
本地化库 本地环境设施包含字符分类和字符串校对、数值、货币及日期/时间格式化和分析,以及消息取得的国际化支持。本地环境设置控制流 I/O 、正则表达式库和 C 标准库的其他组件的行为。 平面类别
定义字符分类表
std::ctype template< class CharT > clas…
3D点云:平面模型上提取凸(凹)多边形方法
目录 一、实现原理
二、实现代码
三、运行结果 一、实现原理 首先要在点云中提取出潜在平面,对原始点云数据进行滤波,根据提取出的平面模型系数从滤波后的点云进行投影,然后根据投影后的点云计算其对应的二维凹(凸)多边形。
二、实现代码
#in
十四、【图章工具组】
文章目录 仿制图章图案图章 仿制图章
纺织图和章工具跟我们之前所用到的修补工具类似,需要我们先按住Alt键选住一块区域,然后调整它的硬度在用我们选择的区域去覆盖,需要注意的是,我们去做的时候尽量一笔覆盖我们想要遮住的区域:
图案图章…
专题:平面、空间直线参数方程下的切线斜率问题
本文研究平面、空间直线在参数方程形式下,切线斜率(即导数)如何表示的问题。 如上图所示。 设 y f ( x ) , x φ ( t ) , y ψ ( t ) 当 t t 0 时, x x 0 , y y 0 ,即点 A 坐…
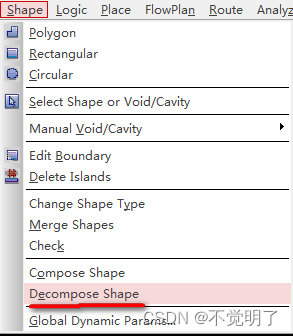
Allegro如何将铜皮变成线段操作指导
Allegro如何将铜皮变成线段操作指导 在用Allegro做PCB设计的时候,有时会需要将一块铜皮变成线段,如下图 如何将这块铜皮变成线段,具体操作如下 点击Shape点击Decompose shape
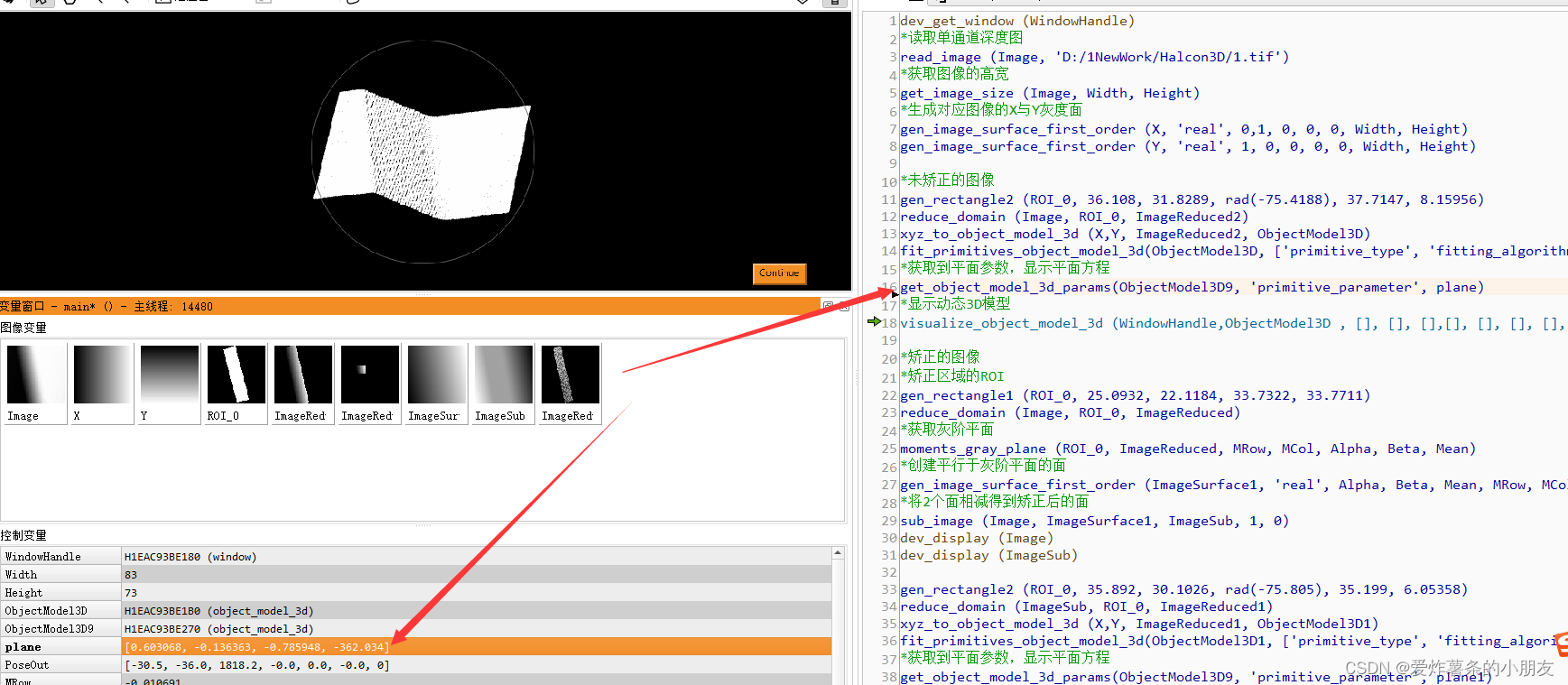
Halcon3D倾斜平面矫正至水平面
前言
在相当多的3d检测中,由于各种因素的干扰,我们所检测的平面通常并不是一个水平面,或者被检测的面不是水平面的情况。尤其是在倾斜面的缺陷检测和平面度检测中,使用被测面与拟合基准面进行计算很难做到准确的定位到缺陷的情况…
![C++/MFC工程[2]——自定义平面直角坐标系](https://img-blog.csdnimg.cn/387d19d73256444f906219f23cdf171a.png)
C++/MFC工程[2]——自定义平面直角坐标系
1、坐标系
我们所熟知的二维平面坐标系如下左图所示,向右为X轴正方向,向上为Y轴正方向,原点一般位于中央,具有I、II、III、IV四个象限。 而计算机屏幕默认的坐标系,原点位于左上方,向右为X轴正方向&#x…
Allegro如何查看PCB上器件的库路径操作指导
Allegro如何查看PCB上器件的库路径操作指导 在做PCB设计的时候,有时需要检查PCB上器件使用的库的路径是否正确,Allegro支持快速将PCB上所有器件的库路径都列出来
如下图 如何显示这个报表,具体操作如下 点击Tools点击Report
FreeCAD|读取STEP、创建平面、相交、瓶子
FreeCAD是一个基于OpenCASCADE的开源CAD/CAE工具。OpenCASCADE是一套开源的CAD/CAM/CAE几何模型核心,来自法国Matra Datavision公司,是著名的CAD软件EUCLID的开发平台。FreeCAD可运行于Windows以及Linux系统环境下,是一种通用的3D CAD建模工具…

P1429 平面最近点对(加强版)
P1429 平面最近点对(加强版)
提交25.77k
通过7.95k
时间限制1.00s
内存限制256.00MB
提交答案加入题单 题目提供者洛谷
难度提高/省选-
历史分数100 提交记录 查看题解
标签 查看算法标签
进入讨论版
相关讨论 查看讨论
推荐题目 查看推荐 洛…
ffmpeg把一个平面视频,做成左右平面视频
要使用FFmpeg将单个平面视频转换为左右(或称为并排)3D格式的视频,你可以使用FFmpeg的filter_complex功能来实现。这种类型的视频通常用于3D视觉效果,其中同一画面的两个版本并排放置,每个版本略有不同的视角࿰…
1.5 空间中的平面与直线
空间中的平面和直线
知识点1 平面方程
1.平面的法向量与法式
定义1 若向量n 垂直与平面N,则称向量n为平面N的法向量。
设一平面通过一直点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0)求垂直于非零向量 n ⃗ \vec{n} n (A,B,C),求改平面N的…
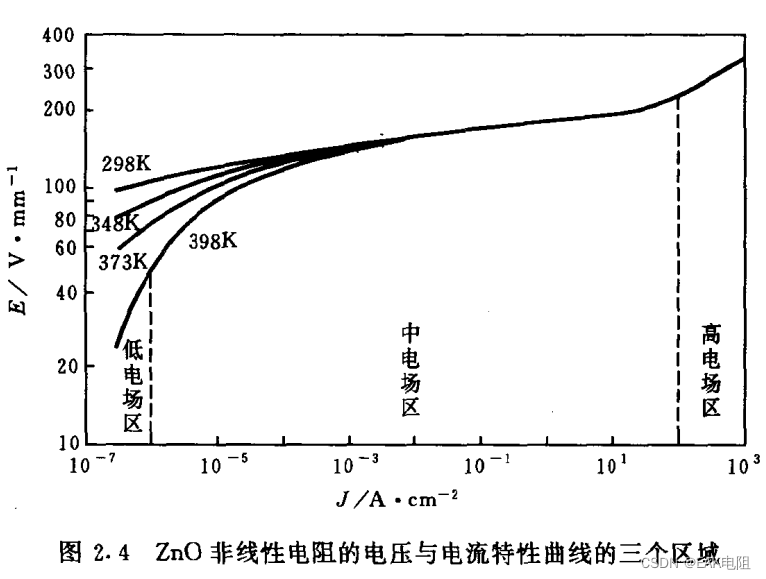
ZnO 阀片的非线性 U-I特性
EAK氧化锌阀片的非线性电压-电流(U-I)特性是它在作为限压元件的实际应用中最为重要的性能。 U-I特性曲线中有一个明显的转折点,即拐点。当作用在阀片上的电压低于拐点电压时,流过阀片的电流密度很小,一般小于1μA/cm”,电压与电流接近线性关系;当电压高于拐点电压时…
Open3D 最小二乘法拟合平面(SVD,Python版本)
文章目录 一、简介1.1最小二乘法拟合平面1.2 SVD角度二、实现代码三、实现效果参考资料一、简介
1.1最小二乘法拟合平面 之前我们使用过最为经典的方式对平面进行了最小二乘拟合(点云最小二乘法拟合平面),其推导过程如下所示: 仔细观察一下可以发现
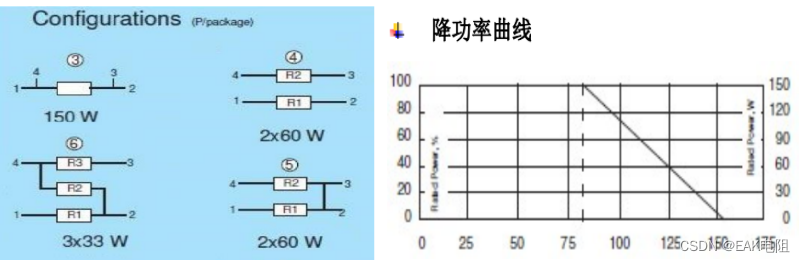
超长爬电结构法蓝底板平面(厚膜、无感设计)中功率电阻
灌封胶封装设计 厚膜无感电阻规格书
EAK特殊设计的模压灌封胶结构设计,使本产品具备超长的 爬电距离,符合VDE0160和UL94-V0的标准。 技术特点
底板中心温度≤85C时,单一电阻结构额定 功率为150W。
四种封装结构,最多封装三个电阻。
2-…

3D点云处理:拟合平面_优化后的最小二乘法_2⭐
文章目录 0. 拟合效果1. 论文:一种稳健的点云数据平面拟合方法1.1 优化过程1.2 代码实现2. 参考关联内容: 3D点云处理:拟合平面_最小二乘法_1 0. 拟合效果 左(拉格朗日乘子法求解)中(SVD)未优化,右侧(SVD+论文)实现的论文 1. 论文:一种稳健的点云数据平面拟合方法 “针对…
PCL拟合并绘制平面(一)
PCL拟合并绘制平面 1、直接使用PCL点云库拟合并绘制平面2、存在问题 1、直接使用PCL点云库拟合并绘制平面
PCL(Point Cloud Library)是一个开源的用于点云处理的C库。要在PCL中绘制平面,可以使用PCL的可视化模块来实现。以下是一个简单的示例…

MATLAB 主成分分析PCA拟合平面点云 (42)
MATLAB 主成分分析PCA拟合平面点云 (42) 一、算法介绍二、算法实现一、算法介绍
主成分分析(Principal Component Analysis,PCA)是一种常用的数据降维和特征提取技术。它的主要思想是通过线性变换将数据投影到一个新的坐标系,使得在新的坐标系中数据的方差最大化。在3D点…
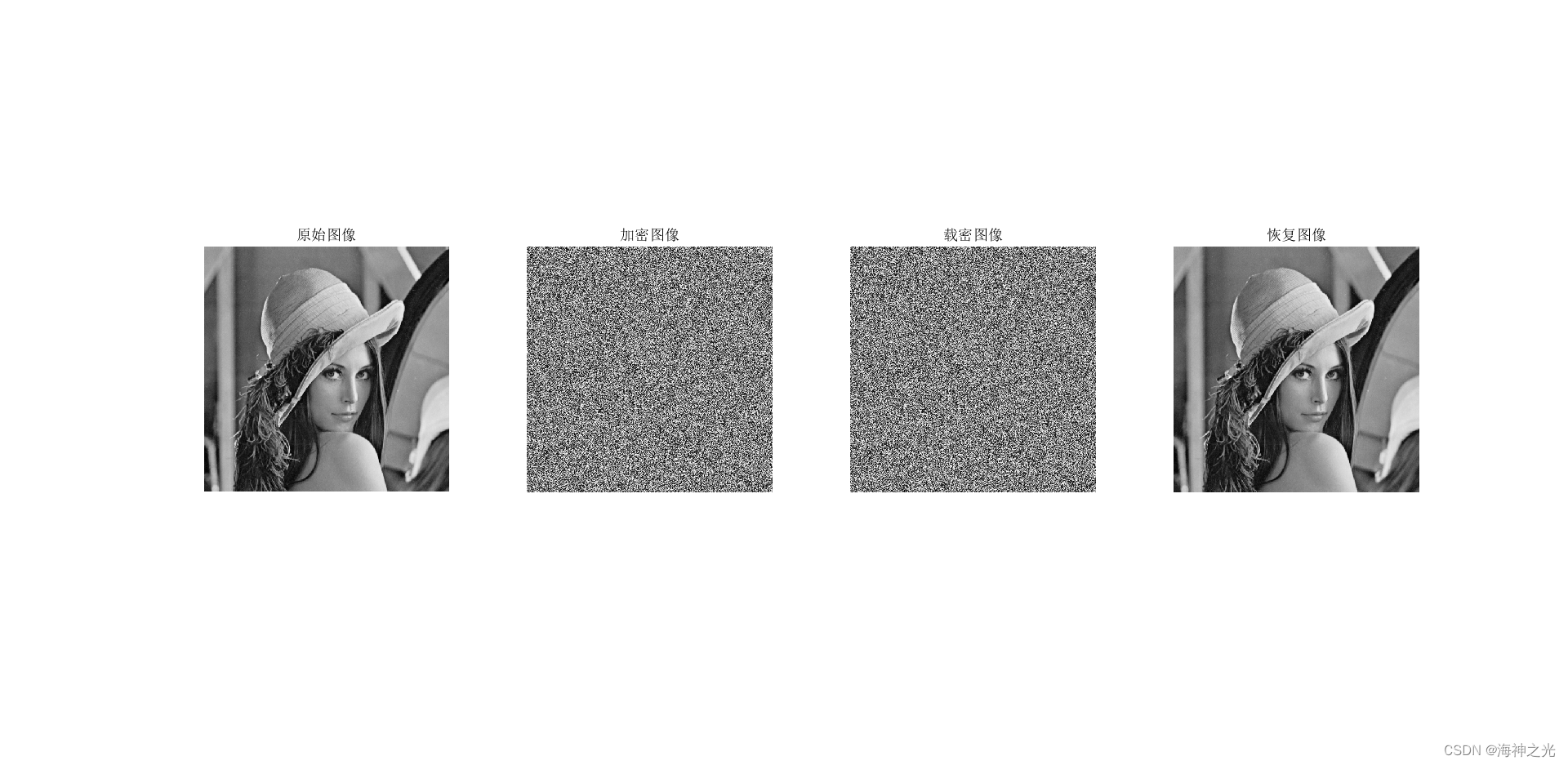
【图像隐藏】基于matlab像素预测和位平面压缩的加密图像可逆数据隐藏【含Matlab源码 2218期】
⛄一、加密图像可逆数据隐藏简介
1 信息隐藏技术概述 信息隐藏技术是把秘密信息隐藏在多媒体信息中的一种方法。图像是最适合信息隐藏的数据载体。信息隐藏的方法主要有数字水印技术、隐写术等。
信息隐藏可以分为有损信息隐藏与可逆信息隐藏信息隐藏技术, 区别在于接收端是否…
PCL 最小二乘法拟合平面(SVD)
文章目录 一、简介1.1最小二乘法拟合平面1.2 SVD角度二、实现代码三、实现效果参考资料一、简介
1.1最小二乘法拟合平面 之前我们使用过最为经典的方式对平面进行了最小二乘拟合(点云最小二乘法拟合平面),其推导过程如下所示: 仔细观察一下可以发现

忘掉繁琐的下载流程!在线PS超好用
对于很多新手小白来说,即便痛下决心想认真攻克PS软件下载教程,却发现连第一个台阶(下载PS软件)都难以跨越。PS软件下载不成功怎么办,PS软件下载免费版安装包怎么找,PS软件下载需要怎样的电脑配置等问题&…
CGAL Mesh网格分割(基于平面)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 与Mesh的裁切功能类似,CGAL的是将平面转换为一个TriangleMesh(三角网格),之后将其与我们输入的Mesh数据求交来获取最终的分割数据。大致的过程如下所述: 首先,CGAL会求出Mesh数据的包围盒,之后会判断我们指定…

KubeVela 为 CNCF 孵化器带来软件交付控制平面能力
CNCF TOC(Technical Oversight Committee,技术监督委员会)已经投票接受 KubeVela 作为 CNCF 的孵化项目。 KubeVela [ 1] 是一个应用交付引擎,也是基于 Kubernetes 的扩展插件,它可以让你的应用交付在当今流行的混合、…

《点云处理》平面拟合
前言
在众多点云处理算法中,其中关于平面拟合的算法十分广泛。本篇内容主要是希望总结归纳各类点云平面拟合算法,并且将代码进行梳理保存。
环境:
VS2019 PCL1.11.1
1.RANSAC
使用ransac对平面进行拟合是非常常见的用法,PCL…

3D点云处理:平面度|平行度(增加精度的平行度优化)|平面之间的夹角|点到平面的投影点(附源码)
文章目录 1. 平面度2. 平行度3. 两平面之间的夹角4. 点到平面的投影5. 代码实现--平面度|平行度(增加精度的平行度优化)|平面之间的夹角|点到平面的投影点1. 平面度 根据最新ISO 12781-2011国际标准,以及与之对应的国家标准《GB/T 24630.1-2009产品几何技术规范(GPS)平面度第…
20231028-黑马web进阶-平面转换
文章目录 位移:translate案例-双开门旋转案例多重转换缩放渐变background-image:linear-gradient(颜色1,颜色2,...); 位移:translate
语法:transform:translate(水平移动距离,垂直移动距离); 取值(正负均可)ÿ…
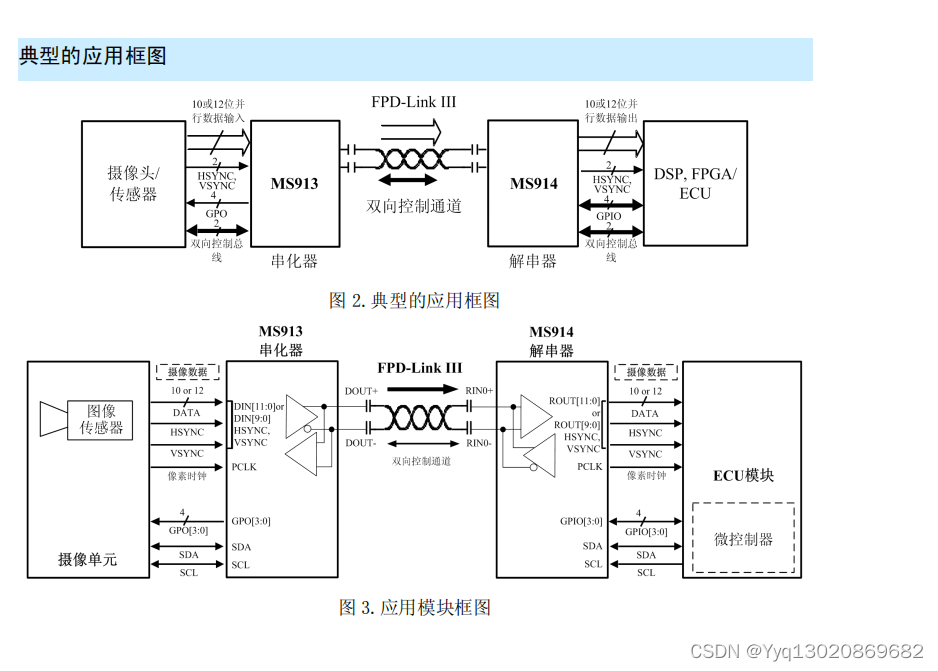
汽车级应用MS913/914 25-100MHz 10/12 位用于平面显示器链路Ⅲ的具有直流平衡编码和双向控制通道的串化器和解串器
MS913/MS914 芯片组是 25MHz~100MHz 10 位/12 位 FPD Link III SER/DES(串化器/解串器),它提供高速 FPD-Link III 接口和高速正向通路以及用于差分对上数据发送的双向 控制通路。广泛应用于车载摄像,医疗设备,管道探测等领 域。 主要特点 …

小孔平板应力集中问题matlab有限元编程【源码+PPT讲义】|三节点三角形单元|平面单元|稀疏矩阵 |Comsol网格
专栏导读 作者简介:工学博士,高级工程师,专注于工业软件算法研究本文已收录于专栏:《有限元编程从入门到精通》本专栏旨在提供 1.以案例的形式讲解各类有限元问题的程序实现,并提供所有案例完整源码;2.单元…

PCL拟合并绘制平面(二)
使用RANSAC拟合点云平面 1、C实现2、效果图 普通的点云平面拟合方式在一般情况下可以得到较好的平面拟合效果,但是容易出现平面拟合错误或是拟合的平面不是最优的情况。此时就需要根据自己的实际使用情况,调整平面拟合的迭代次数以及收敛条件。
使用RAN…

UG\NX CAM二次开发 设置安全平面的起点和法向 UF_CAM_set_auto_blank
文章作者:代工 来源网站:NX CAM二次开发专栏 简介: UG\NX CAM二次开发 设置安全平面的起点和法向 UF_CAM_set_auto_blank 效果: 代码:
void MyClass::do_it()
{ //获取加工环境tagtag_t setup_tag=NULL_TAG;UF_SETUP_ask_setup(&setup_tag);//返回当前工序导…
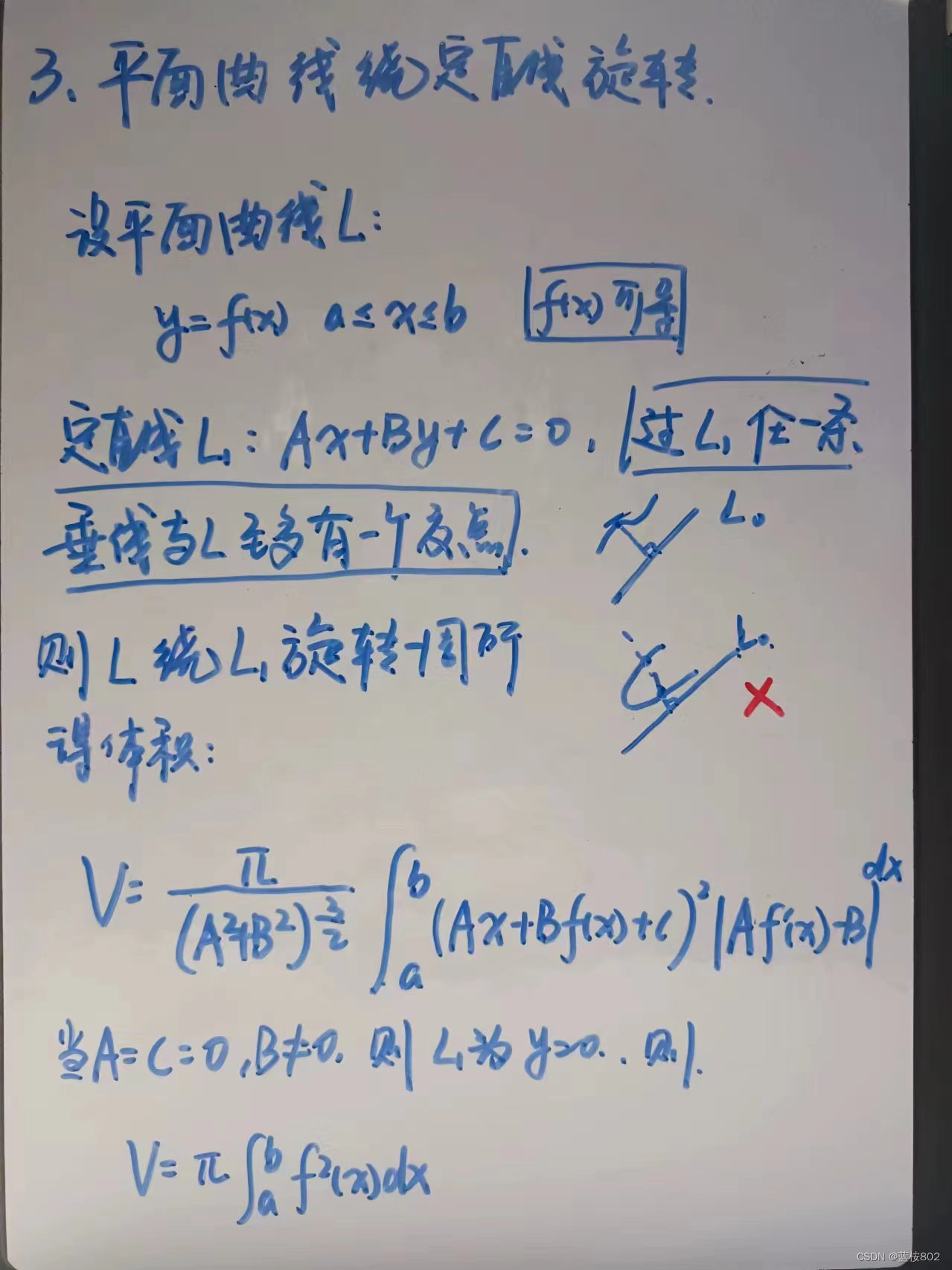
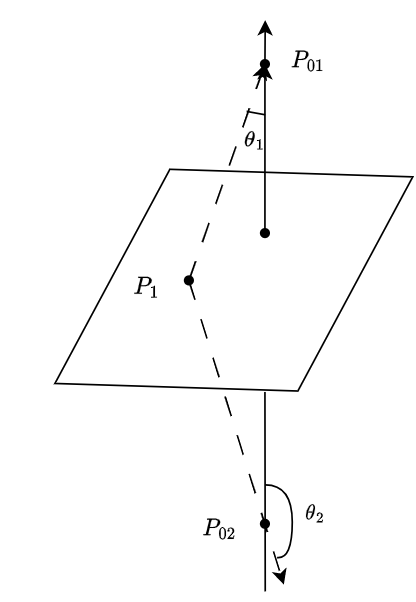
考研高数(平面图形的面积,旋转体的体积)
1.平面图形的面积 纠正:参数方程求面积 2.旋转体的体积(做题时,若以x为自变量不好计算,可以求反函数,y为自变量进行计算)
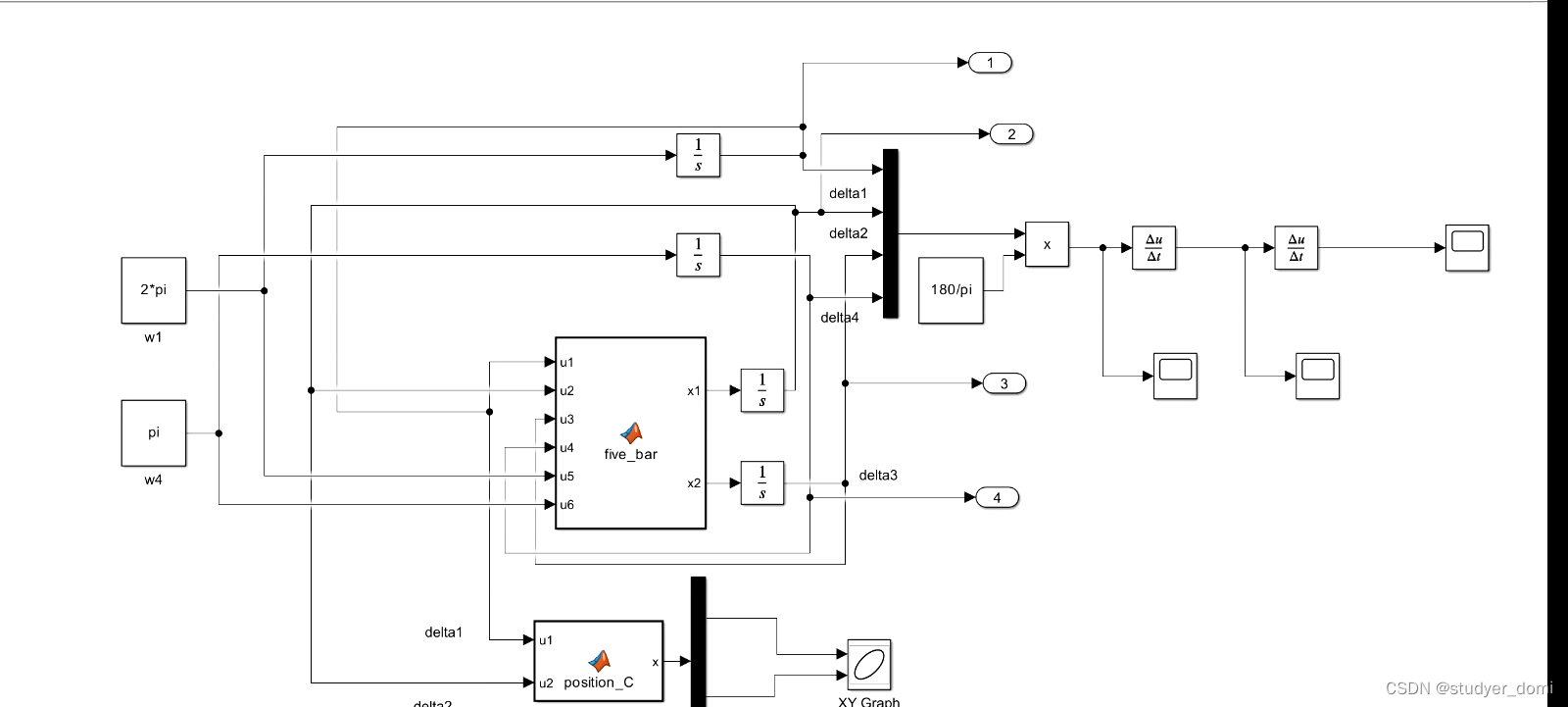
simulink平面五杆机构运动学仿真
1、内容简介
略
68-可以交流、咨询、答疑 2、内容说明
simulink平面五杆机构运动学仿真 [ 摘 要 ] 以 MATLAB 程序设计语言为平台 , 以平面可调五杆机构为主要研究对象 , 给定机构的尺寸参数 , 列出所 要分析机构的闭环矢量方程 , 使用 MATLAB 软件中 SIMULINK 仿真工…

求解平面上物体的有向3d包围盒
算法流程: (1)点云下采样(体素滤波); (2)ransac算法分割拟合地面平面; (3)裁剪工作区域(指定空间中四个点,裁剪点云只保留…
多点拟合求平面的RANSAC算法
对于多点求平面,直接的传统方法是三点求平面,通过求解方程组得到平面的法向量和截距。
但仅适用于点集能够恰好拟合到一个平面的情况,如果点集不能恰好拟合到一个平面,则需要使用更复杂的方法来处理,例如使用最小二乘…

PCL 平面拟合——RANSAC
文章目录 一、基本思想二、代码示例1、参数选择2、核心代码3、完整代码4、结果展示三、关于 RANSAC 的一些思考参考文献一、基本思想
随机抽样一致性算法RANSAC(Random sample consensus)是一种迭代的方法,从一系列包含有离群值的数据中计算数学模型参数的方法。RANSAC算法本…
AM@空间曲面@平面@面面位置关系@点面距离
文章目录 曲面曲线平面点法式方程不共线的3点确定一个平面方程同解平面方程的一般式特别情形与坐标轴平行的平面与坐标轴垂直与坐标面平行的平面ABC0例 截距式两平面的夹角👺两平面的位置关系垂直关系平行关系例 点到平面的距离小结例 曲面
空间解析几何中"曲…
MT1069 圆切平面
n个圆最多把平面分成几部分?输入圆的数量N,问最多把平面分成几块。比如一个圆以把一个平面切割成2块。 不考虑负数,0或者其他特殊情况。
格式
输入格式:输入为整型
输出格式:输出为整型
样例 1
输入: …
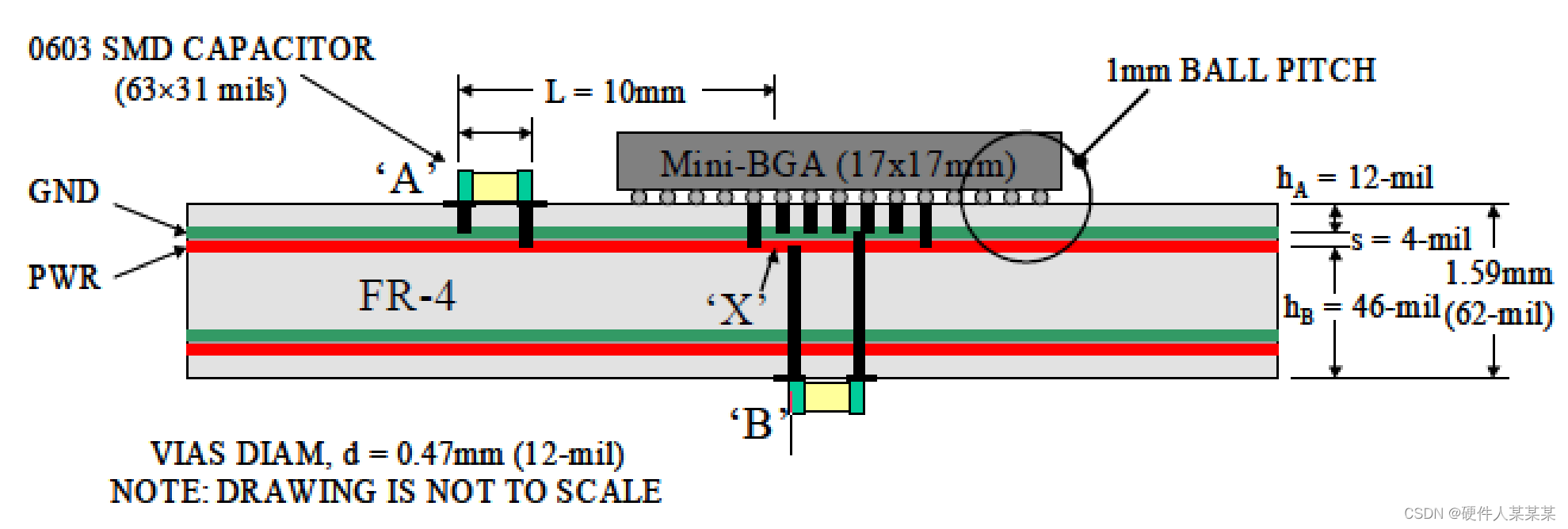
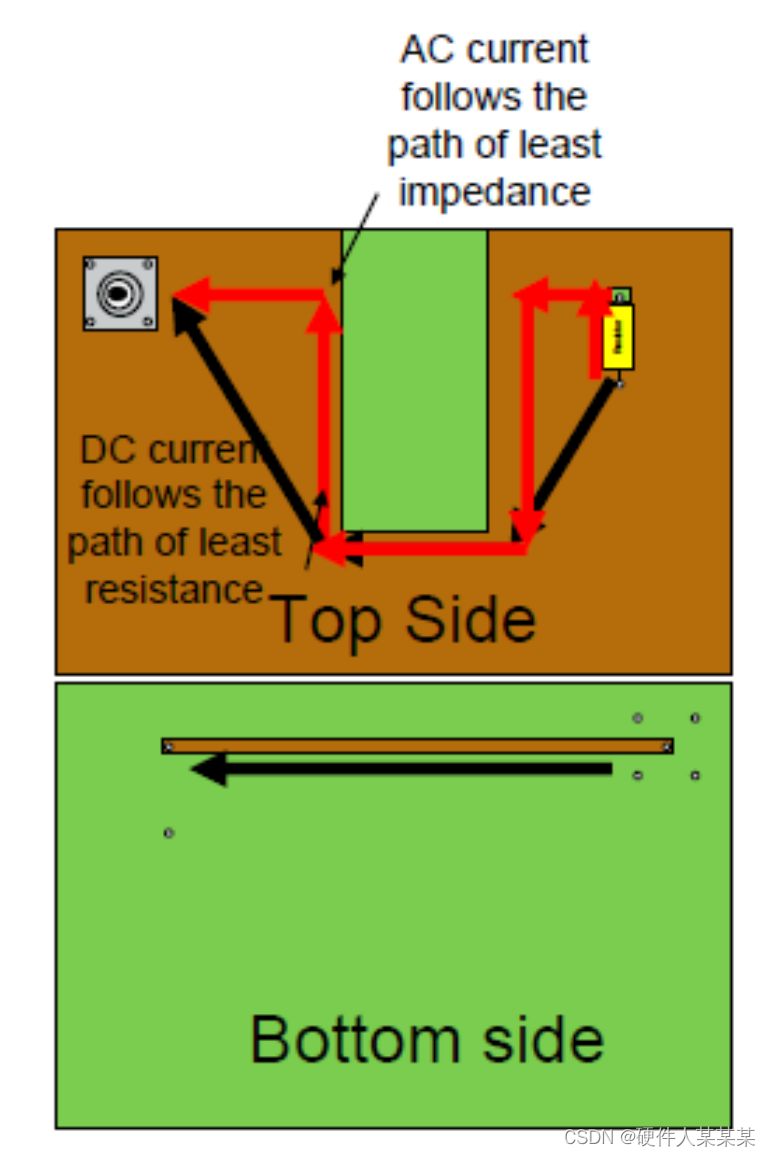
PCB基础~电源和地平面,去耦电容
电源和地平面
• 应该尽可能的使用电源和地平面, Why? – 在设备和电源之间提供一个低阻抗的路径 – 提供屏蔽 – 提供散热 – 降低分布电感 • 一个完整的无破损的平面是最优选择 – 破碎的地平面会在走线的上下层之间 引入寄生电感 • Remember! • 低频时&…

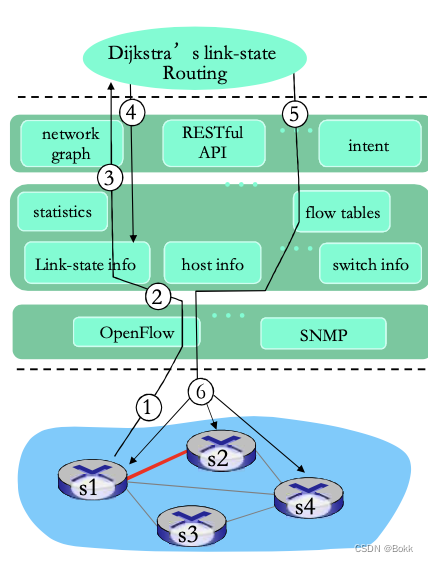
计算机网络——30SDN控制平面
SDN控制平面
SDN架构
数据平面交换机
快速、简单,商业化交换设备采用硬件实现通用转发功能流表被控制器计算和安装基于南向API,SDN控制器访问基于流的交换机 定义了哪些可以被控制哪些不能 也定义了和控制器的协议 SDN控制器(网络OS&#…
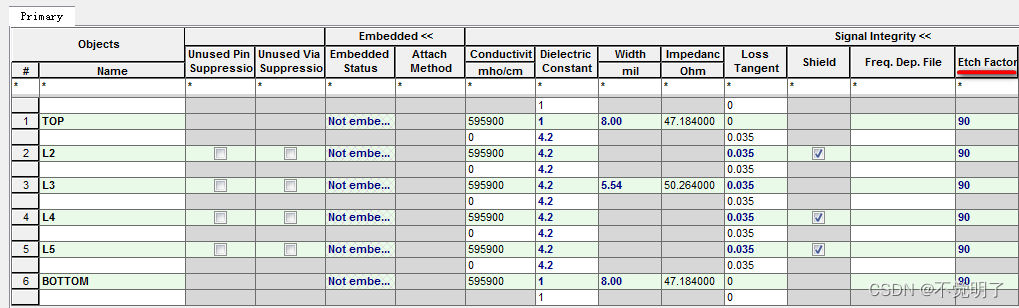
Allegro层叠中的Etch Factor-铜皮的腐蚀因子如何计算
Allegro层叠中的Etch Factor-铜皮的腐蚀因子如何计算 在用Allegro进行PCB设计的时候,Cross-section中需要填入对应的信息,一般填入每层的厚度即可,如下图 当PCB需要进行仿真分析的时候,Etch-Factor这个值是必须要填写的,如下图 目前看到的都是90这个值,这是一个理论值。 …
tinkerCAD入门操作(4):使用对齐工具和工作平面帮助程序
tinkerCAD入门操作(4):使用对齐工具和工作平面帮助程序
介绍 在本课中,我们将建造一座简单的城堡。您将了解有关对齐工具、镜像和帮助程序工具的所有信息。
开始
您将使用的第一个工具是对齐工具。
无需使用鼠标仔细定位两个部分,对齐工具…
基于随机抽样或最小二乘法 c++实现三维点云平面检测
随机抽样
std::vector<int> random(int n, int N){std::vector<int> rets;for(int i0; i<N; i){while(true){int v rand() % n;if(std::find(rets.begin(), rets.end(), v) rets.end()){rets.push_back(v);break;}}}return rets;
}
bool Plane(std::vector&l…
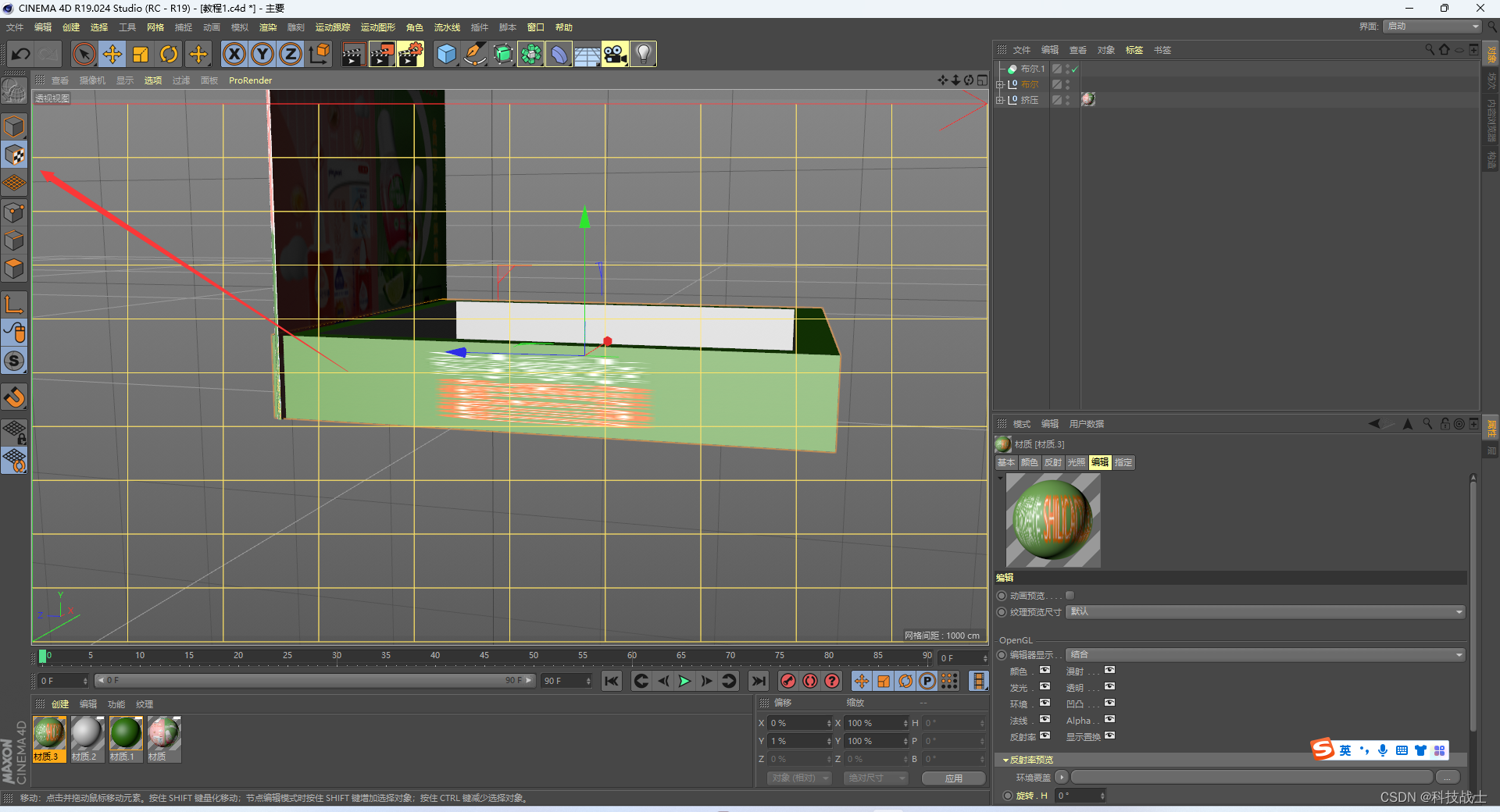
c4d+AI+PS设计广告展示架/销售柜台/展示盒子的建议
1、首先做出我标识出来的样子,这里称作A面。(可用软件:PS、AI、cdr等) 2、制作用于展示盒A面PNG图片(PS来掏空空白处用于描边)。 操作:按需求缩小图片,载入选区,新建图层…
设计师找灵感,就上这5个网站~
分享5个设计灵感网站,多看看设计大佬的优秀作品,对提升审美、灵感都有很大的帮助,还可以结合好的设计运用到自己的作品当中,话不多说,上干货~
(PS:部分网站需要科学上网才能访问~) …
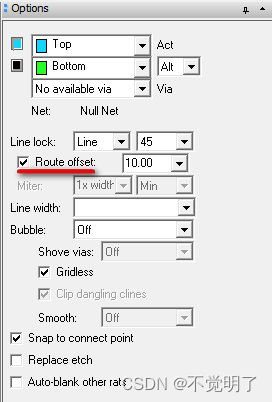
Allegro无法打开10度走线命令的原因和解决办法
Allegro无法打开10度走线命令的原因和解决办法 做PCB设计的时候,10度走线也是较为常见的设计方式,Allegro支持10度走线,如下图 需要10度走线的时候,Options只需要勾选Route offset命令即可 但有时options处会看不到10度走线的命令,如下图
【Vuforia+Unity】AR04-地面、桌面平面识别功能
不论你是否曾有过相关经验,只要跟随本文的步骤,你就可以成功地创建你自己的AR应用。
官方教程Ground Plane in Unity | Vuforia Library 这个功能很棒,但是要求也很不友好,只能支持部分移动设备,具体清单如下…
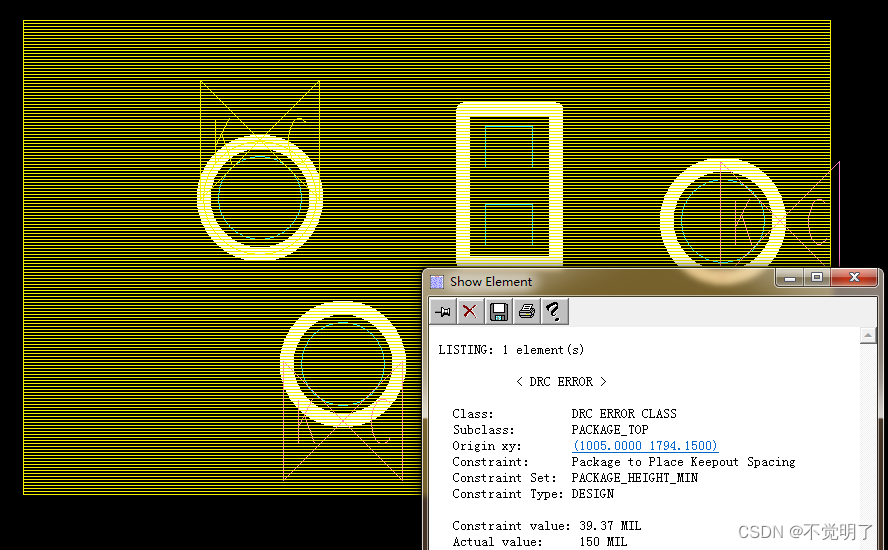
Allegro如何设置默认器件的高度信息操作指导
Allegro如何设置默认器件的高度信息操作指导 在给PCB设置限高的时候,一般会添加一个package keepout的铜皮,如下图 如果器件有高度信息,且没有超过限高要求,是不会有DRC报错的,如果器件没有高度信息,软件会默认给匹配一个高度信息,从而导致误报,如下图 可以看到默认的高…